1 引言
描述一个物体在空间中运动的位置和姿态需要六个独立参量,包括描述物体质心位置的三个参量和姿态倾角的三个参量。在无陀螺捷联惯导系统中,通过对采用加速度传感器获得的沿空间惯性坐标系的三个正交轴向的线加速度和角加速度(即6维加速度)积分得到被测对象在空间坐标系中运动的位置、姿态和速度等信息,为控制和制导提供依据。目前大多数加速度计只能检测一个或三个轴向的线加速度,因此无陀螺捷联惯导的关键在于研究一种能够获取六维加速度的加速度传感器。此外,六维加速度传感器在机器人、工业自动控制、交通运输监测、地震预测、武器技术、摄影摄像设备等领域也具有广泛的应用。
实现六维加速度传感主要有四种方式:
①利用微机电系统技术将多个单轴的电容式、压阻式、压电式和其他原理的加速度传感器集成到单块硅片上实现多维加速度传感。这种方法提高了加速度传感器的微小化程度,但是降低了加速度传感器的机械精度,难以承受较大的过载。
②利用粘贴在膜片上的应变片的组合实现6维加速度传感。这种分析方法复杂,加速度解耦困难,目前还没有很完整的分析。
③采用静电超导原理实现6维加速度传感。只能用于微重力环境下,比较复杂,成本也较高。
④采用多只单轴加速度传感器进行组合实现六维加速度传感。其基本原理是通过固定在同一刚体上的多只单轴加速度传感器的输出分离出刚体沿空间惯性坐标系三个正交轴向的线加速度RI和角加速度ωi。由于多只单轴加速度传感器均固定在同一刚体上,因此感受到的刚体沿空间惯性坐标系三个正交轴向的线加速度和角加速度是相同的,通过分析各单轴加速度传感器的输出方程并建立方程组,结合特殊的布局结构对方程组进行简化,即可通过计算得到6维的加速度。
本文提出并研究了一种基于立方体结构的6维加速度传感器的原理,将6只单轴加速度传感器沿立方体的6条依次首尾相连且任意三条不在同一平面上的棱边布置,通过建立6轴加速度传感模型实既6维加速度与6只单轴加速度传感器输出信号之司的对应关系,实现6轴加速度传感。建立了获取6维加速度的传感模型,并利用建立的传感模型在Matlab/Simulink环境下对6轴加速度传感特性进行了数字仿真分析。
2 工作原理和结构
本文提出并研究的一种基于立方体结构的6维加速度传感器的结构原理如图1(a)所示。根据图1(a),6只单轴加速度传感器沿立方体ABCDEFGH的首尾相连、依次垂直的6条棱边安装构成获取加速度信息的敏感单元,再通过对单轴加速度传感器输出信号进行信号调理和采用相应传感模型进行处理得到6维加速度。联体坐标系BF的原点OB位于立方体的中心,以OB到单轴加速度传感器1的质心连线建立X轴,以OB到立方体的上顶角D的连线(即垂直6只单轴加速度传感器所在平面的方向)建立Z轴,按照右手系准则确定Y轴。6维加速度传感器的三维立体图如图1(b)所示,由中心支撑、三个侧支撑和6只单轴的加速度传感器构成。中心支撑由一个立方体削去两个对角的角并加工出上下两个安装平面获得,侧支撑为阶梯状的条状附件,分别通过销钉固定在中心支撑的三个侧面上,6只单轴加速度传感器分别安装在三个侧支撑的安装平面上。
根据图1所示的6轴加速度传感器的原理及结构,不考虑重力加速度时6维加速度可以通过下式求出,即


式中:A为6只单轴加速度传感器输出构成的列向量;Q为由图1中结构所确定的中间变换矩阵;ωB0和FIB0分别为ωB和FIB的初值。
3 数字仿真分析
3.1 系统原理
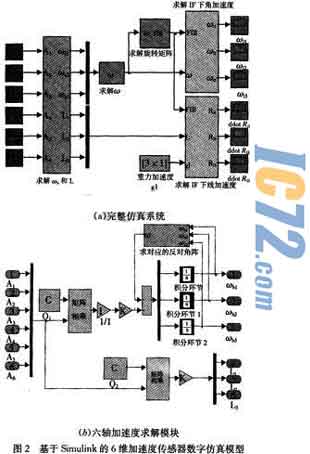
根据式(1)~(6)给出的6维加速度传感器的传感模型,建立了在Matlab/Simulink环境下的6维加速度传感器数字仿真模型,包括信号发生模块、6维加速度求解模块、旋转矩阵计算模块、转换模块和显示模块,如图2(a)所示。信号发生模块为6个正弦信号发生器,模拟6只单轴加速度传感器测得的加速度,其输出通过加速度求解模块(如图2(b)所示)根据式(3)得到ωB和L,然后在旋转矩阵求解模块中根据式(6)计算得到FIB,最后转换模块根据式(1)和(2)计算得到惯性坐标系下的加速度ωi和RI,送显示模块记录显示。
对6维加速度传感器的传感特性的数字仿真包括沿惯性坐标系各单轴的线加速度传感特性的仿真。以下给出沿惯性坐标系Z轴方向的线加速度传感特性仿真的原理,沿X轴、Y轴方向的仿真原理与之类似。为了方便和计算,6维加速度传感器的联体坐标系BF的初始安装姿态与惯性坐标系IF重合(即FIB0=E)。
当被测载体沿IF的Z轴方向产生Asin(φt+λ)的正弦振动时,6只单轴加速度传感器的输出相同,可以通过下式得到

反之,当6只单轴加速度传感器的输出相同为Asin(φt+λ)时,对应的振动情况应该是载体沿IF的Z轴方向产生的正弦振动。
3.2 结果与分析
当信号发生模块的输出为6路相位一致的正弦信号(其时间曲线如图3(a)所示)时,6只单轴加速度感受到的线加速度构成的输入向量为
AT=[sin(t)sin(t)sin(t)sin(t)sin(t)sin(t)]T
在Simulink下仿真(步长0.1 s)的六维加速度的时间曲线如图3(b)所示。根据图3(b),BF原点只存在沿IF的Z轴方向的线加速度,同时注意到,由于存在积分环节,绕Y轴的角加速度ωI2和沿x轴的线加速度RI1存在时间累积误差。240 s内ωI2的时间累积误差小于2.5×10-6rad/s2,RI1的时间累积误差小于3×10-14m/s2。

采用相同的方法可以对载体沿IF的X轴和Y轴方向的线加速度的情况进行仿真,结果与实际情况相吻合。
4 结论
本文介绍了基于6只单轴加速度传感器的6维加速度传感器的原理与结构,建立了相应的传感模型,并在Simulink下对6维加速度传感器沿惯性坐标系Z轴方向的线加速度传感特性进行了仿真分析。结果表明,该原理及结构能够有效实现对被测载体的6维加速度传感。 |