ХӘТӘЈә ҪйЙЬБЛТ»ЦЦјЖЛг»ъҙ®РРҝЪҫӯ¶юҙОҝӘ·ўЈ¬УГЧчІҪҪшөз»ъҝШЦЖЖчөДРВ·Ҫ·ЁЎЈјЖЛг»ъНЁ№эПтҙ®РРҝЪ·ўЛНКэҫЭІъЙъҝШЦЖВціеЈ¬КөПЦ¶ФІҪҪшөз»ъөДҝШЦЖЎЈ
№ШјьҙКЈә ҙ®РРҝЪ ¶юҙОҝӘ·ў ҝШЦЖВціе ІҪҪшөз»ъҝШЦЖЖч
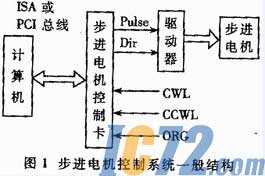
ІҪҪшөз»ъФЪКэҝШ»ъҙІЎўТҪБЖЖчРөЎўТЗЖчТЗұнөИЧФ¶Ҝ»т°лЧФ¶ҜЙиұёЦРөГөҪБЛ№г·әУҰУГЎЈУГјЖЛг»ъҝШЦЖІҪҪшөз»ъөДНЁіЈЧч·ЁКЗІЙУГІҪҪшҝШЦЖҝЁЈ¬ПөНі№№іЙИзНј1ЛщКҫ[1][2]ЎЈЖдЦРPulseЎўDir·ЦұрОӘҝШЦЖөз»ъөДЧӘ»»ІҪКэәНРэЧӘ·ҪПтөДРЕәЕЈ»CWLЈЁClock Wise LimitЈ©ЎўCCWLЈЁCounter Clock Wise LimitЈ©·ЦұрОӘөз»ъЛіЎўДжКұХлРэЧӘөДПЮО»РЕәЕЈ»ORGОӘ¶ЁО»РЕәЕЎЈ
ХвЦЦ·Ҫ·ЁІ»ҪціЙұҫҪПёЯЈ¬¶шЗТІ»ұгУЪІЩЧчЎЈФЪјЖЛг»ъА©Х№ІЫЙП°ІЧ°ҝШЦЖҝЁЈ¬ұШРиҙтҝӘ»ъПдІЕДЬІЩЧчЈ¬¶шЗТФЪРЎРНЖҪ°еөзДФәНЗ¶ИлКҪөзДФЦРёщұҫГ»УР°ІЧ°ҝШЦЖҝЁөДҝХјдәНА©Х№ІЫЎЈҪ«јЖЛг»ъҙ®РРҝЪ¶юҙОҝӘ·ўЈ¬УГУЪҝШЦЖІҪҪшөз»ъЈ¬ҙъМжҝШЦЖҝЁөДЧчУГЈ¬ҫЯУРіЙұҫөНЎўІЩЧчјтөҘЎўјжИЭРФәГөИУЕөгЎЈ
1 RS232ҙ®РРҝЪј°ұаіМ
јЖЛг»ъҙ®РРҪУҝЪІЙУГRS232ұкЧјЈә№ж¶ЁВЯјӯ1өДөзЖҪОӘ-3Ў«-15VЈ¬ВЯјӯ0өДөзЖҪОӘ+3Ў«+15VЈ¬іЈУГөДРЕәЕУР8ёцЈЁҪУҝЪОӘDB9MІеЧщКұЈ¬ТэҪЕәЕИзұн1ЛщКҫЈ©Ј¬ЖдЦРRXDЎўTXDОӘКХЎў·ўКэҫЭЈ¬ҝЙУлRS232ҙ®РРҝЪЙиұёЦұҪУҪшРРНЁС¶Ј¬RTSЎўDTRЎўCDЎўDSRЎўCTSЎўBELLОӘҝШЦЖУлјмІвMODEMөДРЕәЕЈ¬ФЪНЁС¶№эіМЦРЖрБӘВзУлҝШЦЖЧчУГЎЈКэҫЭёсКҪУР5Ўў6Ўў7Ўў8О»јёЦЦЈ¬1О»ЖрКјО»ЈЁВЯјӯ0Ј©Ј¬1Ўў1.5»т2О»НЈЦ№О»ЈЁВЯјӯ1Ј©Ј¬ҝЙТФСЎФсЖжРЈСйЎўЕјРЈСйәНОЮРЈСйЈ¬іЈУГІЁМШВКОӘ2400Ўў4800Ўў7200Ўў9600bpsөИЎЈҙ®РРҝЪұаіМ·Ҫ·ЁЦчТӘУРИэЦЦЈәУІјюұаіМ·ЁЎўОДјюІЩЧч·ЁЎўҙ®ҝЪҝШјю·ЁЎЈ
ұн1 RS232ҪУҝЪёчТэҪЕ¶ЁТе ТэҪЕәЕ Чч УГ ·Ҫ Пт
123456789 CD КэҫЭФШІЁјмІвRXD ҪУКХКэҫЭTXD ·ўЛНКэҫЭDTR КэҫЭЦХ¶ЛЧјұёҫНРчGND РЕәЕөШDSR КэҫЭЙиұёЧјұёҫНРчRTS ЗлЗу·ўЛНCTS Зеіэ·ўЛНRI ХсБеЦёКҫ КдИлКдИлКдіцКдіцКдИлКдіцКдИлКдИл
1.1 УІјюұаіМ·Ё ЦұҪУК№УГ¶ЛҝЪөДКдИлЎўКдіцЈЁI/OЈ©әҜКэ¶Фҙ®РРҝЪөДҝШЦЖөзВ·ҪшРРұаіМЎЈККУГУЪDOSј°WindowsЖҪМЁЈЁWindows MeТФЗ°өДёч°жұҫЈ©Ј¬ө«ФЪ»щУЪNTјјКх№№ҪЁөДІЩЧчПөНіЈЁWindows NTЎўWindows 2000ЎўWindows XPөИЈ©ЦРТтІ»ФКРнУГ»§іМРтЦұҪУІЩЧчУІјю¶шІ»ККУГЎЈіЈУГөД¶ЛҝЪКдИлЎўКдіцәҜКэЈЁЦёБоЈ©УРЈә»гұаУпСФөДINЎўOUTЦёБој°ИнЦР¶ПөчУГЈ¬CУпСФөДinport()ЎўoutportЈЁЈ©Ўўinportb()Ўўoutportb()Ј¬C++өД_inp()Ўў_outp()өИЎЈјЖЛг»ъҙ®РРҝЪІЙУГIntel 8250ТмІҪҙ®РРНЁС¶Чйјю№№іЙЈ¬COM1ЎўCOM2ЎўCOM3ЎўCOM4өД»щөШЦ··ЦұрОӘ16#3F8ЈЁ16ҪшЦЖКэ3F8Ј¬ұнКҫ·ЁПВН¬Ј©Ўў16#2F8Ўў16#3E8Ўў16E2E8Ј¬ІЁМШВКТтЧУЈЁDRЈ©јЖЛг·Ҫ·ЁОӘЈәDR=1.8432ЎБ1000000/16BЈ¬8250ұаіМЗлјыІОҝјОДПЧ[3]ЎЈ 1.2 ОДјюІЩЧч·Ё[4] ОДјюІЩЧч·ЁКЗҪ«ҙ®РРҝЪЧчОӘПөНіөДТ»ёцОДјюАҙҙҰАнЈ¬НЁ№э¶ФХвёцОДјюөД¶БЎўРҙІЩЧчТэ·ўҙ®ҝЪ¶ФКэҫЭҪшРРКХЎў·ў¶ҜЧчЎЈХвЦЦ·Ҫ·ЁФЪDOSЎўWindowsЎўWindows NTЎўWindows 2000ј°Windows XPөИЖҪМЁПВ¶јДЬХэіЈ№ӨЧчЎЈАэИзФЪBASICУпСФЦРҝЙУГУпҫдЈәOPEN Ў°COM1Ј¬1200Ј¬nЈ¬8Ј¬1Ј¬rs,cs,ds,cdЎұAS #1Ҫ«ҙ®РРҝЪCOM1ЧчОӘОДјю#1ҪшРР¶БРҙІЩЧчЎЈФЪVC++ЦРЈ¬ҝЙУГCreateFile()ЎўBuildCommDCB()ЎўRead()ЎўWriteЈЁЈ©ЎўEscapeCOMMFunction()өИәҜКэҪ«ҙ®РРҝЪЧчОӘОДјюҪшРРІЩЧчЎЈ 1.3 ҙ®ҝЪҝШјю·Ё УГVBј°VC++ұаіМКұЈ¬ҝЙУГҝШјю¶Фҙ®РРҝЪҪшРРұаіМЎЈХвЦЦ·Ҫ·ЁНЁУГРФәГЈ¬ФЪWindowsЎўWindows NTЎўWindows2000ј°Windows XPөИЖҪМЁПВ¶јДЬХэіЈ№ӨЧчЎЈФЪVBЦРЈ¬К№УГMSCOMMҝШјюЈ»ФЪVC++ПВК№УГMicrosoft Communication ControlХвТ»ActiveXАаҝШјюЎЈҙ®ҝЪҝШЦЖК№УГ·Ҫ·ЁЗлІОҝјMSDNЎЈ 2 ҙ®РРҝЪІҪҪшөз»ъҝШЦЖЖч№ӨЧчФӯАн
1.1 ҙ®РРҝЪ·ўЛНКэҫЭ№эіМСРҫҝ
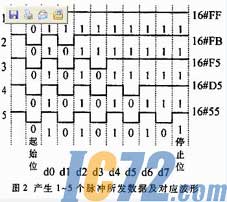
ФЪҙ®РРҝЪ·ўЛНКэҫЭөД№эіМЦРЈ¬ҙ®РРҝЪПИ·ўЛНЖрКјО»ЈЁВЯјӯ0Ј©ҪшРРН¬ІҪЈ¬ҪУЧЕ°ҙ№ж¶ЁөДІЁМШВКЈЁBЈ©ҙУөНО»өҪёЯО»ТАҙО·ўЛННЁС¶КэҫЭөДёч¶юҪшЦЖО»Ј¬Чоәу·ўЛННЈЦ№О»ЈЁВЯјӯ1Ј©ЎЈұнКҫГҝёц¶юҪшЦЖО»өДВЯјӯөзЖҪФЪTXD¶ЛөДұЈіЦКұјдОӘ1/BГлЎЈИз№ы°ҙ8О»КэҫЭО»Ўў1О»НЈЦ№О»ЎўОЮЖжЕјРЈСй·ҪКҪ·ўЛНКэҫЭЈ¬Лщ·ўЛНКэҫЭөД¶юҪшЦЖО»КЗ0Ўў1Ҫ»МжөДЎЈАэИзЈәКэҫЭИЎ01010101ЈЁјҙ16ҪшЦЖөД16#55Ј©Ј¬Жд·ўЛН№эіМИзНј2ЦР5ЛщКҫЈ¬Гҝ·ўЛНТ»ёцЧЦҪЪЈ¬ФЪTXD¶Л·ўіц5ёцВціеЈ¬ЦЬЖЪT=2/BЈ¬јҙЖөВКf=B/2ЎЈёДұд·ўЛНКэҫЭөДёч¶юҪшЦЖО»Ј¬ұгҝЙФЪTXD¶ЛөГөҪІ»Н¬өДІЁРОЎЈНј2КҫіцУыІъЙъ1Ў«5ёцВціеКұУҰ·ўіцөДКэҫЭј°¶ФУҰөДІЁРОЎЈ
2.2 ҙ®РРҝЪІҪҪшөз»ъҝШЦЖЖч№ӨЧчФӯАн
НЁ№э·ЦОцҙ®РРҝЪ·ўЛНКэҫЭөД№эіМҝЙЦӘЈ¬ҙУTXD¶ЛЛщ·ўіцөДВціеНкИ«ВъЧгҝШЦЖІҪҪшөз»ъөДРиТӘЈә
ўЩёДұд·ўЛНөДЧЦҪЪКэј°Лщ·ўЛНөДЧЦҪЪДЪИЭЈ¬ҝЙФЪTXD¶ЛІъЙъИОТвКэБҝөДВціеЈ»
ўЪёДұдІЁМШВКҝЙ¶ҜМ¬ёДұд·ўЛНВціеөДЖөВКЎЈ
ЛщТФЈ¬ҝЙУГTXDЧчОӘҝШЦЖІҪҪшөз»ъөДВціеРЕәЕЈЁPulseЈ©ЎЈ
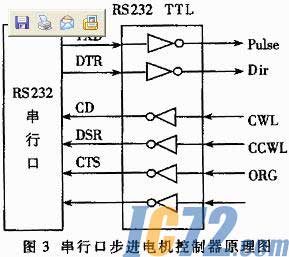
ҙ®РРҝЪөДDTRЎўRTSЎўCTSЎўDSRЎўCDЎўRIЛдИ»ФЪҙ®РРНЁС¶ҪУҝЪЦРұ»¶ЁТеОӘІ»Н¬№ҰДЬөДОХКЦРЕәЕЈ¬ө«НЁ№э¶Ф8520өД·ЦОцҝЙЦӘЈ¬ЛьГЗҫщҝЙЧчОӘТ»°гөДI/OБҝК№УГЈ¬¶шЗТІ»ВЫІЙУГДДЦЦұаіМ·Ҫ·ЁЈ¬¶јДЬәЬ·ҪұгөШ¶ФХвР©РЕәЕҪшРР¶БРҙІЩЧчЎЈИфТФDTRЈЁ»тRTSЈ©ЧчОӘ·ҪПтҝШЦЖРЕәЕЈЁDirЈ©Ј¬Н¬Кұ·ЦұрТФCDЎўDSRЎўCTSЎўRIЧчОӘЧҙМ¬јмІвРЕәЕЈЁCWLЎўCCWLЎўORGөИЈ©Ј¬ФтҪцУГТ»ёцҙ®РРҝЪҫНТСМṩБЛІҪҪшөз»ъҝШЦЖЖчРиТӘөДЛщУРРЕәЕЎЈХэКЗ»щУЪҙЛФӯАнЈ¬ОТГЗҝӘ·ўБЛҙ®РРҝЪІҪҪшөз»ъҝШЦЖЖчЈ¬ІўіЙ№ҰУҰУГФЪ°еІД¶аөгіЙРОЙиұёөДҝШЦЖПөНіЦРЎЈУЙУЪҙ®РРҝЪТСЦұҪУМṩБЛҝШЦЖІҪҪшөзөз»ъЛщРиөДЛщУРРЕәЕЈ¬Ц»РиҪ«ёчРЕәЕУЙRS232өзЖҪұдіЙTTLөзЖҪјҙҝЙЎЈіЈУГөДөзЖҪЧӘ»»ЖчјюУРDS1488ЎўDS1489ЎўMAX232өИ[5]ЎЈУГјЖЛг»ъҙ®РРҝЪҝӘ·ўөДІҪҪшөз»ъҝШЦЖЖч№ӨЧчФӯАнИзНј3ЛщКҫЎЈ
3 ИнјюЙијЖј°јЖЛг
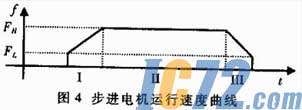
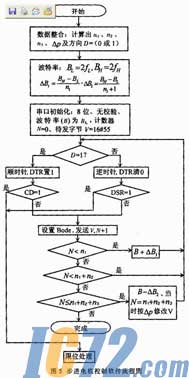
ОӘұЬГвөз»ъК§ІҪәНМбёЯөз»ъФЛРРЛЩ¶ИЈ¬Ҫ«ІҪҪшөз»ъФЛРР№эіМОӘ·ЦИэёцҪЧ¶ОЈәөНЛЩЖр¶ҜІўјУЛЩЎўёЯЛЩФЛРРЎўјхЛЩІўНЈЦ№Ј»ПаУҰөШҝШЦЖВціеТІ·ЦОӘЈәЙэЖөЎўёЯЖөЎўҪөЖөИэ¶О[6]Ј¬ИзНј4ЛщКҫЎЈ
ФЪУГҙ®РРҝЪ·ўЛНКэҫЭІъЙъҝШЦЖВціеКұЈ¬ЛдИ»НЁ№эёДұдЛщ·ўЧЦҪЪДЪИЭөД°м·ЁДЬІъЙъ1Ў«5ЦРјдИОТвёцКэөДВціеЈ¬ө«Иф·ўЛНТ»ёцЧЦҪЪЛщЧЦҪЪөДВціеЙЩУЪ5ёцЈ¬әуГжҪУЧЕ·ўЛНКэҫЭІъЙъөДВціеКұЈ¬БҪёцЧЦҪЪПОҪУКұЛщІъЙъөДВціеЖөВКәНХјҝХұИҫщ»бІъЙъІЁ¶ҜЎЈОӘК№өз»ъФЛРРөДИэёцҪЧ¶ОДЬЖҪ»¬№эВЛЈ¬РиТӘ¶ФГҝёцҪЧ¶ОөДВціеКэБҝҪшРРөчХыЈ¬К№ўсЎўўтБҪёцҪЧ¶ОөДІҪКэҫщОӘ5өДХыКэұ¶ЈЁ·ЦұрОӘn1ЎБ5Ўўn2ЎБ5Ј©Ј»Ҫ«·З5ХыКэұ¶өДІҪКэ°ІЕЕФЪјхЛЩНЈіөөДўуҪЧ¶ОЈ¬·ўіцВціеКэОӘn3ЎБ5+ҰӨpЈ¬ЖдЦРҰӨp=(1Ў«4)ЎЈХвҝЙНЁ№эёДұдўуҪЧ¶О·ўЛНөДЧоәуТ»ёцЧЦҪЪДЪИЭКөПЦИОТвКэБҝөДВціеКдіцЎЈІъЙъ1Ў«4ёцВціеУҰ·ўЛНөДКэҫЭ·ЦұрОӘ16#FFЎў16#FBЎў16#F5Ўў16#D5ЎЈ
УЙНј4ЛщКҫөДөз»ъФЛРР№эіМҝЙЦӘЈ¬ФЪөз»ъФЛРР№эіМЦРЈ¬ҝШЦЖВціеөДЖөВКfУҰЛжКұұд»ҜТФВъЧгөз»ъөНЛЩЖрНЈј°ёЯЛЩФЛРРөДРиТӘЎЈВціеЖөВКУЙ·ўЛНКэҫЭөДІЁМШВКЈЁBЈ©ҫц¶ЁЈ¬Гҝ·ўіцТ»ёцВціеРиУГБҪёц¶юҪшЦЖО»1әН0Аҙ№№іЙЖдёЯЎўөНөзЖҪЈ¬ЛщТФf=B/2Ј¬НЁ№эөчХы·ўЛНКэҫЭөДІЁМШВКҝЙёДұдЛщ·ўіцөДҝШЦЖВціеөДЖөВКЎЈ°ҙіЈ№жФтІЁМШВКПөБР·ўЛНКэҫЭКұЛщІъЙъөДҝШЦЖВціеЖөВКұд»ҜҪПҙуЈ¬І»ДЬВъЧгөз»ъХэіЈЖрНЈј°өчЛЩөДТӘЗуЈ¬ОӘҙЛјЖЛг»ъРи°ҙ·ЗұкЧјөДВЛМШВК·ўЛНКэҫЭТФІъЙъИОТвЖөВКөДҝШЦЖВціеЎЈТ»°гФЪөз»ъЖр¶Ҝј°НЈЦ№ҪЧ¶ОЈЁўсЎўўуЈ©Гҝ·ўЛНТ»ёцЧЦҪЪөчХыТ»ҙОІЁМШВКЈ¬ТФК№өз»ъЖрНЈөГҫЎБҝЖҪ»¬ЎЈ
ўсЎўўуҪЧ¶ОЖөВКөДөчХыБҝҰӨf1ЎўҰӨf2·ЦұрОӘЈә
ҰӨf1=(FH-FL)/n1 (1)
ҰӨf2=(FH-FL)/n3+1 (2)
ПаУҰөДІЁМШВКөДөчХыБҝҰӨB1ЎўҰӨB2·ЦұрОӘЈә
ҰӨB1=ЈЁBH-BLЈ©/n1=ЈЁ2FH-2FLЈ©/n1 ЈЁ3Ј©
ҰӨB2=ЈЁBH-BLЈ©/(n3+1)=(2FH-2FL)/(n3+1) (4)
·ўЛНөЪiёцЧЦҪЪөДІЁМШВКBiОӘЈә
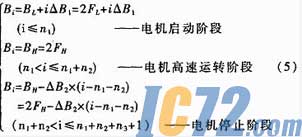
УГҙ®РРҝЪЦұҪУҝШЦЖІҪҪшөз»ъөДҝШЦЖИнјюБчіМНјИзНј5ЛщКҫЎЈ
4 ёЯј¶ҝШЦЖ№ҰДЬ
¶ФІҪҪшөз»ъөДёЯј¶ҝШЦЖЈ¬ЦчТӘКЗЦёЧФ¶ҜХТБгј°¶а»ъБӘ¶ҜІоІ№ЎЈ
ХТБг№ҰДЬКЗЦёҝШЦЖІҪҪшөз»ъЗэ¶ҜФЛРР»ъ№№Ј¬НкіЙ¶ЁО»өД№эіМЎЈФЪХТБгКұЈ¬өз»ъТ»°гТФөНЛЩФЛРРЈ¬өұІвөҪORGРЕәЕҪшөз»ъНЈЦ№ЎЈУЙУЪФЛРРЛЩ¶ИөНЈ¬ОӘјт»ҜіМРтЙијЖЈ¬Гҝ·ўЛНТ»ёцЧЦҪЪЈ¬ФЪTXD¶ЛҝЙТФЦ»КдіцТ»ёцВціеЈ¬ІвөҪORGРЕәЕФтНЈЦ№·ўЛНЎЈОӘұЈЦӨКдіцВціеөДХјҝХұИОӘ50%Ј¬·ўЛНЧЦҪЪ¶ЁОӘ16#F0ЎЈХТБгіМРтөДЙијЖҝЙІОХХНј5ЛщКҫЎЈ
ІоІ№КЗЦёҝШЦЖБҪМЁ»тБҪМЁТФЙПөз»ъ°ҙ№ж¶ЁөДЛЩұИФЛРРЈ¬Ҫш¶шҝШЦЖЦҙРР»ъ№№СШ№ж¶ЁөД№мјЈФЛРРЎЈУЙУЪТ»°гјЖЛг»ъЦ»УРБҪёцҙ®РРҝЪЈ¬ХвЦЦ·Ҫ·ЁЦ»ККУГУЪ¶юО¬ІоІ№ҝШЦЖЎЈНЁіЈБҪёцҙ®РРҝЪУГПаН¬өДІЁМШВКҪшРР·ўЛНЈ¬НЁ№эөчХы·ўЛНөДЧЦҪЪКэј°·ўЛНГҝёцЧЦҪЪЛщІъЙъөДВціеёцКэөДІ»Н¬АҙөчХыБҪёцөз»ъөДФЛРРЛЩ¶ИәНО»ЦГЎЈ
КөјКФЛРРЦӨГчЈ¬УГҙ®РРҝЪЙиұёөДІҪҪшөз»ъҝШЦЖЖчҫЯУРК№УГ·ҪұгЎўРФДЬОИ¶ЁЎўіЙұҫөНЎўҝЙТЖЦІРФәГЎўІ»Ри°ІЧ°УІјюЙиұёЗэ¶ҜіМРтөИУЕөгЎЈ
ЦұҪУІЙУГјЖЛг»ъҙ®РРҝЪЙијЖөДІҪҪшөз»ъҝШЦЖЖчККУГУЪ¶ФИ«КэЧЦКҪЛЕ·юөз»ъҪшРРҝШЦЖЎЈ
ұҫОД¶ФјЖЛг»ъҙ®РРҝЪЎўІўРРҝЪЧКФҙөД¶юҙОҝӘ·ўУҰУГЖрөҪБЛТ»¶ЁөДҪијшУҰУГЎЈ
|