1964ФъУРЙњЕФL.A.ZadehНЬЪкДДСЂСЫФЃК§МЏКЯРэТл,1974ФъгЂЙњЕФE.HMamdaniбажЦГіЕквЛИіФЃК§ПижЦЦїЁЃФЃК§ПижЦВЛашвЊСЫНтЖдЯѓЕФОЋШЗЪ§бЇФЃаЭ,ИљОнзЈМвжЊЪЖНјааПижЦ,НќЪЎФъРДЕУЕНСЫЙуЗКЕФгІгУЁЃ
ФЃК§ПижЦЦїЕФЩшМЦВЮЪ§жївЊгаЃКИїЪфШыЁЂЪфГіБфСПФЃК§згМЏЕФСЅЪєЖШКЏЪ§,ФЃК§ПижЦЙцдђ,ЪфШыЪфГіБфСПЕФБШР§БфЛЛвђзгЕШЁЃвЊвРОнЩшМЦепЕФОбщКЭЗДИДЕїЪдВХФмЩшМЦГівЛИіБШНЯКУЕФФЃК§ПижЦЦїЁЃдЄЯШВЩгУМЦЫуЛњЗТецЗНЗЈПЩОЁПьСЫНтФЃК§ПижЦЕФЬиад,ПЩЫѕЖЬЩшМЦжмЦкЁЃ
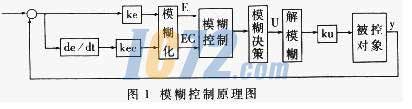
ЖўЮЌФЃК§ПижЦЦїгІгУНЯЮЊЙуЗКЁЃЦЋВюКЭЦЋВюБфЛЏзїЮЊФЃК§ПижЦЦїЕФСНИіЪфШыСПЁЃЯШЖдЫќУЧНјааФЃК§СПЛЏДІРэ,ЕУЕНФЃК§БфСПEКЭEC,АДФЃК§ПижЦЙцдђНјааФЃК§ОіВпЕУЕНФЃК§ПижЦСПU,дйОЙ§НтФЃК§КЭБШР§БфЛЛЕУЕНЪЕМЪПижЦСПЪфГіЁЃШчЭМЃБЁЃ
MATLABШэМўЬсЙЉздЖЏПижЦЁЂаХКХДІРэЁЂЩёОЭјТчЁЂФЃК§ТпМЁЂаЁВЈЗжЮіЁЂЭМЯѓДІРэЕШжюЖрЙЄОпЯф,ЙІФмЧПДѓгІгУЙуЗКЁЃБОЮФНщЩмгУMATLAB5.1ЕФФЃК§ТпМЙЄОпЯфЃЈFuzzyLogic)ЁЁЩшМЦФЃК§ПижЦЦї,ВЂгУMATLABЕФSIMULINKНјааЗТецЕФЗНЗЈЁЃ
ЃБгУMATLABФЃК§ТпМЙЄОпЯфЩшМЦФЃК§ПижЦЦї
1.1СЅЪєЖШКЏЪ§ЕФНЈСЂ
ШєШЁEЁЂECЁЂUЕФТлгђОљЮЊ{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},ЦфФЃК§згМЏЖМЮЊ{NB,NM,NS,ZO,PS,PM.PB}ЁЃЙВга49ЬѕФЃК§ПижЦЙцдђЁЃ
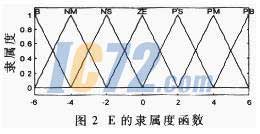
дкMATLABжаМќШыУќСюFUZZY,НјШыФЃК§ТпМБрМДАПкFISEditorЁЃНЈСЂEЁЂECЁЂUЕФСЅЪєЖШКЏЪ§,гаШ§НЧаЮЁЂИпЫЙаЮЁЂЬнаЮЕШ11жжПЩЙЉбЁдё,дкДЫбЁГЃгУЕФШ§НЧаЮЃЈtrimf)ЁЁСЅЪєЖШКЏЪ§ЁЃЭМЃВЮЊEЕФСЅЪєЖШКЏЪ§ЁЃ
1.2ФЃК§ПижЦЙцдђМАОіВпЗНЗЈ
ПижЦЙцдђЪЧЖдзЈМвЕФРэТлжЊЪЖгыЪЕМљОбщЕФзмНсЁЃЙВга49ЬѕЙцдђ,ШчБэ1ЫљЪОЁЃ
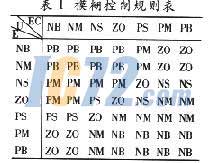
дкRulesEditorДАПкжаЪфШыет49ЬѕПижЦЙцдђЁЃР§ШчЃКifEisNBandECisPSthenUisPM
ФЃК§ОіВпвЛАуВЩгУMamdani`s(min-max)ЁЁОіВпЗЈЁЃНтФЃК§гажиаФЗЈЁЂЕШЗжЗЈЁЂзюДѓСЅЪєЖШЦНОљЗЈЕШЃЕжжПЩЙЉбЁдё,дкДЫВЩгУжиаФЗЈ(centroid)ЁЃ
ШчДЫЩшМЦЕФФЃК§ПижЦЦїЕФЪфГігыЪфШыЕФЙиЯЕЧњУцЭМШчЭМ3ЫљЪОЁЃЯдШЛФЃК§ПижЦЪЧвЛжжЗЧЯпадПижЦЁЃ
ЃВSIMULINKЗТецМАВЮЪ§ЕФЕїећ
MATLABЬсЙЉЕФSIMULINKЪЧвЛИігУРДЖдЖЏЬЌЯЕЭГНјааНЈФЃЁЂЗТецКЭЗжЮіЕФШэМўАќ,ЫќжЇГжСЌајЁЂРыЩЂМАСНепЛьКЯЕФЯпадКЭЗЧЯпадЯЕЭГЁЃSIMULINKАќКЌЖрИізгФЃаЭПт,УПИізгФЃаЭПтжагжАќКЌЖрИіЙІФмФЃПщЁЃРћгУЪѓБъПЩжБЙлЕиЁАЛЁБГіЯЕЭГФЃаЭ,ШЛКѓжБНгНјааЗТецЁЃЗТецЪБПЩбЁдёИїжжЪ§жЕЫуЗЈЁЂЗТецВНГЄЕШживЊВЮЪ§,ВЂПЩгУФЃФтЪОВЈЦїНЋЗТецЖЏЬЌНсЙћгшвдЯдЪО,жБЙлИпаЇЁЃ
ШчЙћЗТецЕФПижЦаЇЙћВЛТњвт,вЛАуЪзЯШЕїећБШР§БфЛЛвђзгkeЁЂkecМАkuЂдйЕїећФЃК§ПижЦЙцдђКЭСЅЪєЖШКЏЪ§ЁЃ

ЃГЗТецНсЙћ
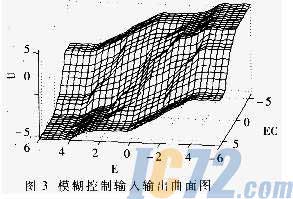
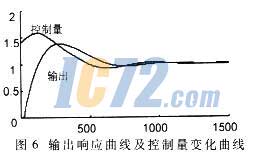
БЛПиЖдЯѓЮЊ,ВЩбљжмЦк5sЁЃЭЈЙ§ЗТецПЩПДГівЛАуЕФФЃК§ПижЦЦїЯрЕБгкЗЧЯпадЕФPDПижЦ,ЮоЛ§ЗжзїгУ,гаОВВю;дкБШР§БфЛЛвђзгжаkuЖдЯЕЭГЮШЖЈадгАЯьзюДѓ,Й§ДѓЪБЯЕЭГЪЇЮШЁЃЭМ5ЮЊЯЕЭГНздОЪфШыЯТБЛПиЖдЯѓЕФЪфГіЯьгІЧњЯпЁЃ
ШчАбФЃК§ПижЦЦїЕФЪфГізїЮЊПижЦСПЕФдіСПЪфГі,ОЭПЩЯћГ§ОВВю,ЕЋетЪБkuгІКмаЁ,ЗёдђЛсЪЙЯЕЭГВЛЮШЖЈЁЃЭМ6ЮЊЪфГіЕФЯьгІЧњЯпМАПижЦСПБфЛЏЧњЯпЁЃ
МЦЫуЛњЗТецЪдбщЖдЪЕМЪПижЦгаживЊжИЕМвтвхЁЃгЩЩЯЪіФЃК§ПижЦЦїЕФЩшМЦКЭЗТецЙ§ГЬПЩПДГіMATLABЕФФЃК§ТпМЙЄОпЯфМАSIMULINKгаШчЯТЬиЕуЃК
•ПЩСщЛюЕиЩшМЦФЃК§ПижЦЦїЁЃдкФЃК§ТпМЙЄОпЯфжаФмЗНБуЕиаоИФЪфШыЪфГіЕФТлгђЁЂФЃК§згМЏЁЂСЅЪєЖШКЏЪ§ЁЂФЃК§ПижЦЙцдђЁЂФЃК§ОіВпЗНЗЈМАНтФЃК§ЗНАИ,ШЛКѓЗТецевЕННЯМбЕФПижЦЗНАИ;
•ПЩжБНгМЦЫуГіФЃК§ПижЦБэ,ЙЉЕЅЦЌЛњНјааЪЕМЪПижЦЪБЪЙгУЁЃЖјШЫЙЄМЦЫуДЫБэЗЧГЃЗБЫі;
•дкSIMULINKЛЗОГЯТ,ПЩзщГЩИќИДдгЕФПижЦЯЕЭГЁЃШчЖдЯѓЮЊЪББфЁЂЗЧЯпад,ПижЦЦїЮЊФЃК§гыPIDЕФЛьКЯаЮЪНЁЃ |