0 引 言
随着单片机的不断推陈出新,特别是高性价比的单片机的涌现,转速测量控制普遍采用了以单片机为核心的数字化、智能化的系统。本文介绍了一种由单片机C8051F060作为主控制器,使用霍尔传感器进行测最的直流电机转速测量系统。
1转速测量及控制的基本原理
1.1转速测量原理
转速的测量方法很多,根据脉冲计数来实现转速测量的方法主要有M法(测频法)、T法(测周期法)和MPT法(频率周期法),该系统采用了M法(测频法)。由于转速是以单位时间内转数来衡量,在变换过程中多数是有规律的重复运动。根据霍尔效应原理,将一块永久磁钢固定在电机转轴上的转盘边沿,转盘随测轴旋转,磁钢也将跟着同步旋转,在转盘下方安装一个霍尔器件,转盘随轴旋转时,受磁钢所产生的磁场的影响,霍尔器件输出脉冲信号,其频率和转速成正比。脉冲信号的周期与电机的转速有以下关系:

式中:n为电机转速;P为电机转一圈的脉冲数;T为输出方波信号周期。根据式(1)即可计算出直流电机的转速。
霍尔器件是由半导体材料制成的一种薄片,在垂直于平面方向上施加外磁场B,在沿平面方向两端加外电场,则使电子在磁场中运动,结果在器件的两个侧面之间产生霍尔电势。其大小和外磁场及电流大小成比例。霍尔开关传感器由于其体积小,无触点,动态特性好,使用寿命长等特点,故在测量转动物体旋转速度领域得到了广泛应用。在这里选用美国史普拉格公司(SPRAGUE)生产的3000系列霍尔开关传感器3013,它是一种硅单片集成电路,器件的内部含有稳压电路、霍尔电势发生器、放大器、史密特触发器和集电极开路输出电路,具有工作电压范围宽、可靠性高、外电路简单、输出电平可与各种数字电路兼容等特点。
1.2转速控制原理
直流电机的转速与施加于电机两端的电压大小有关,可以采用C8051F060片内的D/A转换器DAC0的输出控制直流电机的电压从而控制电机的转速。在这里采用简单的比例调节器算法(简单的加一、减一法)。比例调节器(P)的输出系统式为:

式中:Y为调节器的输出;e(t)为调节器的输入,一般为偏差值;Kp为比例系数
从上式可以看出,调节器的输出Y与输入偏差值e(t)成正比。因此,只要偏差e(t)一出现就产生与之成比例的调节作用,具有调节及时的特点,这是一种最基本的调节规律。比例调节作用的大小除了与偏差e(t)有关外,主要取决于比例系数Kp,比例调节系数愈大,调节作用越强,动态特性也越大。反之,比例系数越小,调节作用越弱。对于大多数的惯性环节,Kp太大时将会引起自激振荡。比例调节的主要缺点是存在静差,对于扰动的惯性环节,Kp太大时将会引起自激振荡。对于扰动较大,惯性也比较大的系统,若采用单纯的比例调节器就难于兼顾动态和静态特性,需采用调节规律比较复杂的PI(比例积分调节器)或PID(比例、积分、微分调节器)算法。
2系统的硬件软件设计
2.1硬件设计
本系统采用单片机C8051F060作为主控制器,使用霍尔传感器测量电机的转速,通过7079最终在LED上显示测试结果,硬件组成如图1所示。此外,还可以根据需要调整控制电机的转速。

控制器C8051F060主要完成转速脉冲的采集、16为定时计数器计数定时、运算比较,片内集成的12位DAC0控制转速,并且通过7279显示接口芯片实现数码显示等多项功能。
系统采用外部晶振,系统时钟SYSCLK等于18432000,T0定时1 ms,初始化时TH0=(-SY-SCLK/1 000)》8;TL0=-SYSCLK/1 000。等待1 s到,输出转速脉冲个数N,计算电机转速值。将1 s内的转速值换算成1 min内的电机转速值,并在LED上输出测量结果。
2.2软件设计
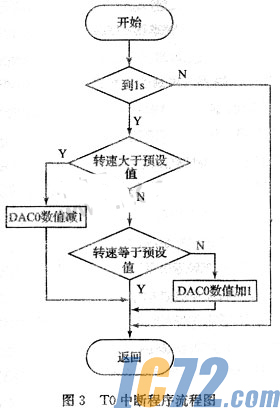
本系统采用C8051F060中的IWT0中断对转速脉冲计数。定时器T1,工作于外部事件计数方式,对转速脉冲计数;T0工作于定时器方式,均工作于方式1。每到1 s读一次计数值,此值即为脉冲信号的频率,根据式(1)可计算出电机的转速。由于直流电机的转速与施加工于电机两端的电压大小有关,故将实际测得的转速值与预设的转速值比较,若大于预设的转速值则减小DAC0的值调整电机的转速,直到转速值等于预设定的值,这样就实现了对电机转速的控制,程序流程如图2、图3所示。

3实验测试结果
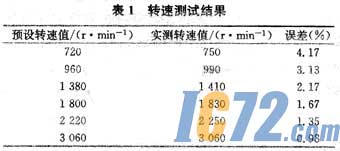
首先在软件中给出转速预设值,即给定常量speed的值,观察速度稳定后七段数码管的数值,比较实际测量的转速值和预设转速值,计算测量误差,评价测量的准确性,测试结果如表1所示。
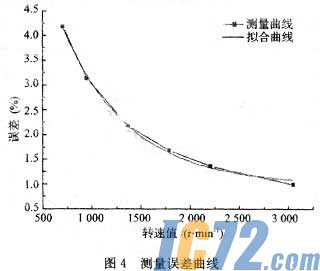
根据实验测试和误差分析绘制了测量误差曲线,如图4所示。误差分析表明,转速测量误差在5%以内,并且随着转速预设值的增加测量误差愈小,呈指数形式下降,函数关系如式(3)所示。
4结论
本测速系统彩集成霍尔传感器敏感速率信号,具有频率响应快,抗干扰能力强等特点。霍尔传感器的输出信号经信号调理后,通过单片机对连续脉冲记数来实现转速测控,并且充分利用了单片机的内部资源,有很高的性价比。经过测试并对误差进行分析发现,该系统的测量误差在5%以内,并且在测量范围内转速越高测量精度越高。所以该系统在一般的转速检测和控制中均可应用。 |