0“˝ —‘
ÀÊ◊≈≥« –ªØµƒΩ¯’π∫Õ∆˚≥µµƒ∆’º∞£¨ΩªÕ®”µº∑º”æÁ£¨ΩªÕ® ¬π ∆µ∑¢£¨ΩªÕ®ª∑æ≥∂Ҫأ¨’‚≥…Œ™≥§∆⁄“‘¿¥¿ß»≈∑¢’π÷–π˙º“∫Õ∑¢¥Ôπ˙º“µƒ—œ÷ÿŒ °£Ω‚戥ÀŒ µƒ÷±Ω”∑Ω∑® «Ã·∏þ¬∑Õ¯µƒÕ®––ƒÐ¡¶°£ø…–ÞΩ®π´¬∑µƒø’º‰”–œÞ£¨∂¯«“Ω®…Ë◊ Ω≥ԥο߃—°£ΩªÕ®œµÕ≥ «∏¥‘”µƒ¥ÛœµÕ≥£¨Œ“√«”¶¥”œµÕ≥¬€µƒπ€µ„≥ˆ∑¢£¨∞—≥µ¡æ∫Õµ¿¬∑◊€∫œ∆¿¥øº¬«£¨‘À”√∏˜÷÷∏þ–¬ºº ıœµÕ≥Ω‚æˆΩªÕ®Œ £¨÷«ƒÐΩªÕ®œµÕ≥(intelligent transport system)”¶‘À∂¯…˙°£
’˚∏ˆ÷«ƒÐΩªÕ®œµÕ≥∂º“‘≥µ¡æµƒ∂®Œªµº∫ΩŒ™∫À–ƒ£¨≥µ¡æµº∫ΩœµÕ≥ «÷«ƒÐΩªÕ®œµÕ≥µƒ÷––ƒ≤øº˛£¨ «∆‰À˚∏˜÷÷π¶ƒÐ”¶”√µƒª˘¥°°£GPSªÚ’þGPS£ØINSªÚ’þGPS£ØDR∑Ω∞∏“‘∆‰Ω·ππºÚµ•°¢≥…±æµÕ¡Æ°¢÷–∏þæ´∂»∫Õ¡º∫√µƒ∂Øè–‘ƒÐµ»”≈µ„£¨±ªπ„∑∫µƒ”¶”√”⁄≥µ¡æµº∫ΩœµÕ≥°£±æŒƒæÕ « µœ÷◊È∫œ∂®Œª£¨‘⁄”¶”√µÿÕº∆•≈‰(map matching£¨MM)∂®Œªºº ıΩ¯––≥µ¡æ∂®Œª£¨“‘±„‘⁄–– ªπ˝≥Ã÷–Œ™”√ªß÷π©◊º»∑ø…øøµƒ µ ±∂®Œª–≈œ¢£¨Œ™÷«ƒÐΩªÕ®πп̜µÕ≥µƒ µœ÷Ã·π©ºº ı…œµƒ±£’œ°£
1µÿÕº∆•≈‰µƒ‘≠¿Ì
µÿÕº∆•≈‰ «“ª÷÷ª˘”⁄»Ìº˛ºº ıµƒ∂®Œª–Þ’˝∑Ω∑®£¨∆‰ª˘±æÀºœÎ «Ω´≥µ¡æ∂®ŒªπϺ£”Î ˝◊÷µÿÕº÷–µƒµ¿¬∑Õ¯–≈œ¢¡™œµ∆¿¥£¨≤¢”…¥Àœý∂‘”⁄µÿÕº»∑∂®≥µ¡æµƒŒª÷√°£
µÿÕº∆•≈‰”¶”√ «ª˘”⁄“‘œ¬2∏ˆºŸ…ËÃıº˛£∫
(1)≥µ¡æ◊Ð «–– ª‘⁄µ¿¬∑…œ£ª
(2)≤…”√µƒµ¿¬∑ ˝æðæ´∂»“™∏þ”⁄≥µ‘ÿ∂®Œªµº∫ΩœµÕ≥µƒ∂®Œªæ´∂»°£ µ±…œ ˆÃıº˛¬˙◊„ ±£¨æÕø…“‘∞—∂®Œª ˝æð∫Õ≥µ¡æ‘À––πϺ£Õ¨ ˝◊÷ªØµÿÕºÀ˘Ã·π©µƒµ¿¬∑Œª÷√–≈œ¢œý±»Ωœ£¨Õ®π˝ µ±µƒ∆•≈‰π˝≥û∑∂®≥ˆ≥µ¡æ◊Óø…ƒÐµƒ–– ª¬∑∂Œ“‘º∞≥µ¡æ‘⁄∏√¬∑∂Œ÷–µƒ◊Ó¥Ûø…ƒÐŒª÷√°£»Áπ˚…œ ˆºŸ…Ë≤ª≥…¡¢£¨‘ÚµÿÕº∆•≈‰Ω´≤˙…˙¥ÌŒÛµƒŒª÷√ ‰≥ˆ£¨≤¢ø…ƒÐµº÷¬œµÕ≥–‘ƒÐµƒ—œ÷ÿœ¬Ωµ°£“ª∞„»œŒ™”√”⁄∆•≈‰µƒ ˝◊÷µÿÕºŒÛ≤Ó≤ª”¶≥¨π˝«…√◊(’Ê µµÿ√Êæý¿Î)°£”…”⁄¬Ωµÿ≥µ¡æ‘⁄≥˝Ω¯»ÎÕ£≥µ≥°µ»÷ÆÕ‚µƒæ¯¥Û∂ý ˝ ±º‰ƒ⁄∂ºŒª”⁄π´¬∑Õ¯¬Á÷–£¨“Ú¥À π”√µÿÕº∆•≈‰ºº ıµƒÃıº˛ «¬˙◊„µƒ°£
2µÿÕº∆•≈‰À„∑®
µÿÕº∆•≈‰µƒÀ„∑® ««˙œþ∆•≈‰‘≠¿Ì∫Õµÿ¿Ìø’º‰Ω”Ω¸–‘∑÷Œˆ∑Ω∑®µƒ»⁄∫œ°£«˙œþ∆•≈‰À„∑®µƒª˘±æÀºœÎ «£∫»Áπ˚∂‘“ªÃı«˙œþ◊ˆ»Œ“‚ ˝¡ø°¢»Œ“‚±»¿˝µƒ∑÷∏Ó£¨∑÷∏Óµ„∂º¬‰‘⁄¡Ì“ªÃı«˙œþ…œ£¨‘Ú¡ΩÃı«˙œþ—œ∏Ò∆•≈‰°£ µº ”¶”√÷–£¨æÕ «º∆À„“ªÃı«˙œþ…œœý∂‘æ˘‘»µƒƒ≥“ª ˝¡ø∑÷∏Óµ„µΩ≤Œøº«˙œþµƒæý¿Îµƒ∆Ωæ˘÷µ£¨Ω´∆‰◊˜Œ™µΩ≤Œøº«˙œþµƒ∆Ωæ˘æý¿Î£¨≤¢Ω´¥À∆Ωæ˘æý¿Îµƒµπ ˝◊˜Œ™∆•≈‰”≈¡”µƒ∂»¡ø°£ø’º‰Ω”Ω¸–‘∑÷Œˆ∑Ω∑®æÕ «‘⁄“—÷™µƒø…ƒÐ’˝»∑µƒµÿ¿Ì ˝æðºØ÷–£¨∞¥’’ø’º‰◊ÓΩ”Ω¸µƒ∑Ω∑®∆•≈‰µ±«∞∂®Œª ˝æð°£
µÿÕº∆•≈‰À„∑®ø…∑÷Œ™2∏ˆœý∂‘∂¿¡¢µƒπ˝≥ã∫“ª «—∞’“≥µ¡æµ±«∞–– ªµƒµ¿¬∑£ª∂˛ «Ω´µ±«∞∂®Œªµ„Õ∂”∞µΩ≥µ¡æ–– ªµƒµ¿¬∑…œ°£∆‰ª˘±æ∞Ï∑® «∞¥’’«˙œþ∆•≈‰µƒÀºœÎ‘⁄≥µ¡æ∫Ωº£µƒ¡⁄Ω¸«¯ƒ⁄À—À˜À˘”–µ¿¬∑¬∑∂Œº∞∆‰◊È∫œ£¨∞—’‚–©◊È∫œ¬∑œþ∑÷±”Î≥µ¡æ∫Ωº£«Û»°∆•≈‰∂»¡ø÷µ£¨Ω´»°µ√◊Óº—∆•≈‰∂»¡ø÷µµƒ◊È∫œ¬∑œþ◊˜Œ™≥µ¡æµ±«∞–– ª¬∑œþ°£µÿÕº∆•≈‰µƒ≥£”√À„∑®”–“‘œ¬º∏÷÷£∫÷±Ω”Õ∂”∞À„∑®£ªœýπÿ–‘À„∑®£ª∞λ∑∂®–‘À„∑®£ª∏≈¬ Õ≥º∆À„∑®£ªƒ£∫˝¬þº≠À„∑®£ªª˘”⁄º∆À„º∏∫Œ(∑« ˝÷µº∆À„)÷™ ∂(≤¢‘ð ±≤ªøº¬«≤‚¡øŒÛ≤Ó)À„∑®°£
”…”⁄º∆À„º∏∫Œ÷™ ∂À„∑®≤ª–Ë“™ ˝æð»⁄∫œ£¨º´…Ÿ–Ë“™øº¬«––≥µ∑ΩœÚ£¨∑«≥£÷±π€£¨≤¢«“ºı…Ÿ¡À–Ì∂ý ˝÷µº∆À„£¨æþ”–º´∏þµƒ’˝»∑∆•≈‰¬ £¨ƒÐπª¬˙◊„øÏÀŸ°¢◊º»∑°¢ µ ±µÿ∂®Œª≥µ¡æŒª÷√µƒ“™«Û°£“Ú¥À£¨±æœµÕ≥—°”√ª˘”⁄º∆À„º∏∫Œ÷™ ∂µƒµÿÕº∆•≈‰À„∑®°£
ª˘”⁄º∆À„º∏∫Œ(∑« ˝÷µº∆À„)÷™ ∂(≤¢‘ð≤ªøº¬«≤‚¡øŒÛ≤Ó)£¨∏˘æð≤‚¡øµ„Œª◊¯±Í”–2÷÷Àº¬∑£∫
(1)≤ª∂œ≈–∂œ∏’≤‚µ√µƒµ„Œª”⁄µ¿¬∑µƒƒƒ“ª≤ý£¨»Áπ˚∏’≤‚µ√µƒµ„”Ϋ∞∆⁄≤‚µ√µƒƒ≥∏ˆµ„Œª”⁄µ¿¬∑1µƒ¡Ω≤ý£¨‘Ú≥µ¡æ‘⁄µ¿¬∑1…œ–– ª°£»Áπ˚µ¿¬∑1 «“ªÃıÕ‰«˙µƒ¬∑æ∂£¨ƒ«√¥æ≠∂ý¥Œ≤‚¡ø£¨≤¢”¶”√∏√∑Ω∑®“≤ø…“‘≈–∂œ≥µ¡æÀ˘¥¶µƒµ¿¬∑°£
(2)÷∂Œº∆À„≤‚¡øµ„ºØµƒÕπø«£¨“¿æ𵿬∑”ÎÕπø«µƒΩª≈–∂œ≥µ¡æ‘⁄ƒƒÃıµ¿¬∑…œ–– ª°£
µ´µ±≤‚¡øµ„»´≤øŒª”⁄1µƒÕ¨“ª≤ý ±£¨À„∑® ß∞а£¡Ì∏√À„∑®√ª”–øº¬«≤‚¡øŒÛ≤Ó£¨”…¥À∂‘GPS≤‚¡øŒÛ≤Óµƒøπ‘Ζ‘≤Ó∫Д–ø…ƒÐ πÀ„∑® ß∞а£
3∏ƒΩ¯µƒµÿÕº∆•≈‰∑Ω∑®
‘⁄À„∑®…˺∆ ±ª˘”⁄“‘œ¬4∏ˆ∑Ω√ʵƒøº¬«£∫“ª «–߬ £¨µÿÕº∆•≈‰À„∑®±ÿ–΃Ðπª¬˙◊„≥µ¡æµº∫Ω µ ±°¢øÏÀŸµƒ“™«Û£ª∂˛ «æ´∂»£¨µÿÕº∆•≈‰µƒƒøµƒæÕ «”––ßµÿ÷∏þ≥µ¡æ∂®Œªƒø±Íµƒæ´∂»£¨≤¢±£≥÷∂®ŒªΩ·π˚µƒŒ»∂®–‘£ª»˝ «≤ªÕ¨ΩªÕ®◊¥øˆ∑÷±∏¯≥ˆ≤þ¬‘¥¶¿Ì“‘÷∏þµ¿¬∑—°»°µ√’˝»∑¬ ∫ÕÀı∂Ã∆•≈‰ ±º‰£ªÀƒ «≥Öڅ˺∆£¨±ÿ–Δ√ø…“‘¡øªØµƒ∑Ω Ω±£÷§≥Öڅ˺∆µƒø…ƒÐ–‘°£ª˘”⁄…œ ˆøº¬«Ã·≥ˆ¡À“‘œ¬µƒµÿÕº∆•≈‰À„∑®£¨À„∑®∑÷Œ™3∏ˆ≤Ω÷Ë°£
3.1 ˝æ𑧥¶¿Ìπ˝≥Ã
¿˚”√∏˜÷÷πÊ‘Ú–Œ≥…µƒ÷™ ∂ø‚π˝¬ÀµÙ“Ï≥£∂®Œª ˝æð£¨≤¢∂‘∆‰Ω¯––”––ß≤Â÷µ°£÷˜“™øº¬«µƒ“ÚÀÿ”–£∫GPS∞ÂÃ·π©µƒPDOP÷µ(“ª∞„»°PROP>6)°¢µÿÕº∑∂Œß(‘§œ»»∑∂®≥µ¡æ–– ªµƒ”––ßµÿ¿Ì«¯”Ú)£¨“‘º∞≥µ¡æµƒ–– ªÀŸ∂»µ»°£∆‰πÊ‘Ú»Áœ¬£∫
πÊ‘Ú1 IF PDOP>6 THEN GPS ˝æð“Ï≥££¨◊™πÊ‘Ú5£ª
πÊ‘Ú2 IF Pos(L£¨B)NOT IN MapArea THENGPS ˝æð“Ï≥££¨◊™πÊ‘Ú5£ª
πÊ‘Ú3 IF Pos(V)>Const Car Speed THENGPS ˝æð“Ï≥££¨◊™πÊ‘Ú5£ª
πÊ‘Ú4 IF Pos(V)πÊ‘Ú5 IF Car InÀ̵¿ªÚ¡¢Ωª«≈THEN GPS ˝æð“Ï≥££ªELSE DR◊”œµÕ≥∆Ù∂تһ°∂®Œª ˝æð°£
∆‰÷–£¨MapAreaŒ™‘§œ»…Ë∂®µƒ≥µ¡æ–– ªµƒµÿ¿Ì«¯”ڿ̬€∑∂Œß£ªPos(L£¨B)Œ™µ±«∞≥µ‘ÿGPS∂®Œª ˝æð£ªPos(V)Œ™µ±«∞≥µ¡æ–– ªÀŸ∂»£ªCar SpeedŒ™‘§œ»…Ë∂®µƒ≥µ¡æ–– ªµƒ◊ӥۿ̬€÷µ°£
3.2≥µ¡æ–– ª¬∑∂Œµƒ»∑∂®
√¿π˙»°œ˚SA∏……Ê’˛≤þ∫Û£¨GPSµƒæ´∂»‘⁄’˝≥£◊¥øˆœ¬–°”⁄25 m£¨‘⁄¥Û≤ø∑÷¬∑∂Œø…“‘÷±Ω”Õ∂”∞ªÒµ√µ±«∞≥µ¡æ–– ªµƒµ¿¬∑°£ƒ—”⁄≈–∂œµƒ«Èøˆ“ª∞„≥ˆœ÷‘⁄≥µ¡æÕ® ”Ãıº˛Ωœ≤Óµ»‘≠“Ú“˝∆µƒGPS∂®Œªæ´∂»ΩµµÕªÚ≥µ¡æ‘⁄µ¿¬∑Ωª≤Êø⁄ ±°£
¡Ó°˜CdistanceŒ™GPS÷µ”屫∞µ¿¬∑Õ∂”∞µ„÷ƺ‰µƒæý¿Î£ª°˜distanceŒ™GPS÷µ”Î∆‰À˚µ¿¬∑Õ∂”∞µ„÷ƺ‰µƒæý¿Î£ªMaxDŒ™‘§œ»…Ë∂®µƒÀ—À˜µ¿¬∑µƒæý¿Î„–÷µ°£„–÷µÕ®≥£∏˘æð∏≈¬ ◊º‘Ú¿¥»∑∂®£¨º¥±ÿ–Γ‘“ª∂®µƒ∏≈¬ ∞¸∫¨≥µ¡æµƒ µº Œª÷√°£∞¥’’Õ≥º∆¿Ì¬€£¨ø… ◊œ»»∑∂®“ª∏ˆŒÛ≤ÓÕ÷‘≤£∫

≥µ¡æ–– ª¬∑∂Œµƒ»∑∂®πÊ‘Ú»Áœ¬£∫
πÊ‘Ú1 µ±Ω” ’µΩµÁ◊”µÿÕºµƒ±Í∂®–≈œ¢»Á¬∑æ∂πʪÆ∫√µƒ––≥µ¬∑œþªÚ’þ”√ªß◊‘∂®“µ¿¬∑ Ù–‘¿ý–Õ¥˙¬Î ±£¨÷±Ω”¿˚”√±Í∂®–≈œ¢∆•≈‰µΩÀ˘πʪƵƒµ¿¬∑¬∑∂Œ…œ»•£ª
πÊ‘Ú2 IF‘⁄“ª∂®„–÷µƒ⁄À—À˜µΩµƒµ¿¬∑ ˝<1THEN≥µ¡æ≤ª‘⁄µ¿¬∑…œ£¨¿˚”√∏≈¬ Õ≥º∆À„∑®£¨ø…∏˘æðGPSµƒ µ ±∂®Œª ˝æðΩ®¡¢“ª∏ˆ∂Øèø…µ˜µƒµ„ª∫≥«¯ÃÊ¥˙ŒÛ≤ÓÕ÷‘≤£¨≤¢¿˚”√ŒÛ≤ÓÕ÷‘≤¿©’π“Ú◊”µƒ‘≠¿Ì£¨…Ë÷√ª∫≥«¯¿©’π±»¿˝“Ú◊”£¨∂Øèø…µ˜µƒª∫≥«¯∞Îæ∂∞¥30 m£¨60 m£¨90 m∫Õ120 mÀƒ∏ˆµ»º∂”…–°µΩ¥Û÷º∂À—À˜¬‰»Îª∫≥«¯ƒ⁄µƒµ¿¬∑¬∑∂Œ°£‘⁄GPS∂®Œª ß–ßµƒ«Èøˆœ¬£¨±ÿ–Δ√DR(∫ΩŒªÕ∆À„)∂®ŒªµƒŒÛ≤Ó≤Œ ˝¿¥¥˙ÃÊGPS≤Œ ˝£¨ÕÍ≥…ŒÛ≤Ó«¯”Úµƒ∂®“£¨“‘±£÷§∆•≈‰π˝≥õƒ¡¨–¯–‘°£¥À ±£¨“™◊¢“‚”…”⁄DRÕ∆À„æþ”–ŒÛ≤Ó¿€ª˝–ß”¶£¨ÀÊ◊≈Õ∆À„π˝≥õƒΩ¯––£¨Õ≥º∆ƒ£–ÕŒÛ≤Ó°¢≤‚¡øŒÛ≤Ó∫Õ∏˜÷÷Àʪ˙ŒÛ≤ÓΩ´ª·≤ª∂œ¿€ª˝°£“Ú¥À£¨‘⁄∞¥DR∂®ŒªµƒŒÛ≤Ó≤Œ ˝∂®“ÂŒÛ≤ÓÕ÷‘≤∫Û£¨ªπ”¶≥À…œ µ±µƒ¿©’π“Ú◊”¿¥¿©¥ÛŒÛ≤Ó«¯”Ú£¨“‘∑¥”≥ŒÛ≤Ó¿€ª˝∂‘∂®Œªæ´∂»µƒ”∞œÏ°£≤…”√≤√ºÙÀ„∑®—∏ÀŸ≈–∂®∫Ó—°¬∑∂Œ£¨Õ®π˝º∆À„≤ªΩˆø…“‘≈–÷™¬‰»Îª∫≥«¯ƒ⁄µƒ¬∑∂Œ£¨ªπø…“‘«Ûµ√¬∑∂Œ”Ϊ∫≥«¯µƒΩªµ„£¨¥”∂¯»°µ√GPS∂®Œª ˝æðµƒ∆•≈‰µ„◊¯±Í£ª
πÊ‘Ú3 IF‘⁄“ª∂®„–÷µƒ⁄À—À˜µΩµƒµ¿¬∑ ˝=1THEN¿˚”√÷±Ω”Õ∂”∞À„∑®£¨∞—¥Àµ¿¬∑◊˜Œ™≥µ¡æ–– ªµƒµ±«∞µ¿¬∑£ª
πÊ‘Ú4 ‘⁄“ª∂®„–÷µƒ⁄À—À˜µΩµƒµ¿¬∑ ˝>1&£¶œýÕ¨µƒµ¿¬∑Ω⁄µ„∫≈THEN≥µ¡æ–– ª‘⁄µ¿¬∑Ωª≤Êø⁄£¨∏˘æðΩªÕ®◊¥øˆ÷÷±A£¨B£¨C£¨DªÆ∑÷£¨≤…»°∂‘”¶≤þ¬‘£¨≤¢¿˚”√œýπÿ–‘À„∑®£¨º∆À„≤‚≥ˆπϺ£”Î1◊ȵÿÕº ˝æ𵃜ýπÿ–‘œµ ˝£¨‘⁄À˘”–∫Ú—°µÿÕº¬∑œþ÷–”Î µº ≤‚≥ˆ¬∑œþœýπÿ–‘◊Ó∏þµƒ¬∑œþº¥Œ™≥µ¡æ–– ªµƒ’Ê µ¬∑œþ£ª
πÊ‘Ú5 ‘⁄“ª∂®„–÷µƒ⁄À—À˜µΩµƒµ¿¬∑ ˝>1£¶£¶≤ªÕ¨µƒµ¿¬∑Ω⁄µ„∫≈THEN≥µ¡æ–– ª‘⁄æý¿ÎΩœΩ¸µƒ∆Ω––µ¿¬∑÷ƺ‰£¨≤…”√ƒ£∫˝¬þº≠À„∑®÷–µƒ¿˚”√æý¿Î∫Õ∑ΩœÚ“™Àÿµƒœþ–‘◊È∫œ∑Ω∑®£¨∏ƒΩ¯À„∑®£¨¡Óp1+p2=1£¨≤¢∂‘p2≤Œ’’ƒ£∫˝¬þº≠À„∑®ƒ£ Ω÷–µƒ»∑∂®œýÀ∆–‘∂»¡ø∫Ø ˝µƒº”»®“Ú◊”Qµƒƒ£∫˝≈–æˆπÊ‘Ú»∑∂®∆‰÷µ£¨»ª∫Ûº∆À„ª˘”⁄«˙œþƒ‚∫œµƒµÿÕº∆•≈‰À„∑®µƒœýÀ∆–‘∂»¡ø∫Ø ˝s£¨≤¢—°»°◊Ó–°÷µ◊˜Œ™¥˝∆•≈‰¬∑∂Œ£¨º¥£∫‘⁄øº¬«Ω«∂»∫Õæý¿Î“ÚÀÿµƒ«Èøˆœ¬£¨∏√¬∑∂Œ¥ÔµΩ◊Ó”≈°£
º”»®“Ú◊”q»°÷µ»Áœ¬£∫
πÊ‘Ú5.1 IFµ¿¬∑Œ™Ω˚––ªÚΩ˚÷π◊™œÚªÚµ•––µ¿µƒƒÊœÚTHEN q=1.5*q£ª
πÊ‘Ú5.2 IF“—”–¬∑æ∂πʪƫ“ «¬∑æ∂πʪƬ∑∂ŒTHEN q=0.5*q£ª
πÊ‘Ú5.3 IFµ¿¬∑”Î≥µ¡æµƒ–– ª∑ΩœÚ“ª÷¬THEN q=0.25*q°£
πÊ‘Ú6 IF∑¢œ÷»Á¿Îø™µ¿¬∑°¢µÁ◊”µÿÕººÚªØ∫ÛΩœŒ™µÕº∂µƒµ¿¬∑√Ë ˆ≤ªπªœÍœ∏°¢≥µ¡æΩ¯»ÎÕ£≥µ≥°µ»«Èøˆ£¨’“≤ªµΩø…“‘∆•≈‰µƒ––◊þ¬∑∂ŒTHEN ÷∂ØÕ£÷πµÿÕº∆•≈‰£¨”√Ω” ’µƒ‘≠ º ˝æð÷±Ω”œ‘ 棨≤ªΩ¯––ŒÛ≤ÓΩ√’˝°£
3.3ª˘”⁄ƒ£∫˝¬þº≠µƒ∆•≈‰¬∑∂Œø…–≈∂»∆¿≈–
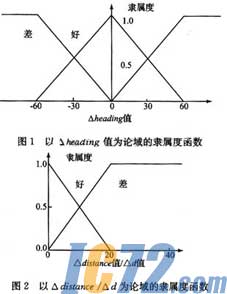
“‘∫Ú—°¬∑∂Œ»°œÚ”Î≥µ¡æ–– ª∑ΩœÚµƒ≤Ó(°˜heading£¨µ•Œª£∫∂»)÷µŒ™¬€”ÚX£¨¡Ó¶Ãhh(X)°¢¶Ãhc(x)Œ™»°œÚ≤Ó(µ•Œª£∫∂»)µƒ÷µx¡• Ù”⁄ƒ£∫˝◊”ºØ"¬∑∂Œ”Î≥µ¡æ–– ª»°œÚ“ª÷¬–‘∫√"∫Õ"¬∑∂Œ”Î≥µ¡æ–– ª»°œÚ“ª÷¬–‘≤Ó"µƒ¡• Ù∂»£¨‘Ú¶Ãhh(X)°¢¶Ãhc(X)ø…»°Œ™£∫

‘⁄≥ı ºŒª÷√∏¯∂® ±£¨¿˚”√DRÕ∆À„ƒÐπª◊º»∑µÿ√Ë ˆ≥ˆ≥µ¡æ‘⁄∂à ±º‰ƒ⁄µƒ–– ªπϺ£°£“Ú¥À£¨ø…∞¥»Áœ¬∑Ω Ω∂®“Â∫Ú—°¬∑∂Œ–Œ◊¥”屫∞≥µ¡æ–– ªπϺ£µƒœýÀ∆∂»£∫∏˘æðDRÕ∆À„‘≠¿Ì£¨œ÷ ±øÃtnµƒ≥µ¡æŒª÷√(xn£¨yn)∫Õ≥µ¡æ–– ª»°œÚ¶»nø…∏˘æð…œ“ª ±øÃtn-1µƒ≥µ¡æŒª÷√(xn-1£¨yn-1)∫Õ–– ª»°œÚ¶»n-1∞¥œ¬¡–π´ ΩÕ∆≥ˆ£∫
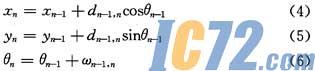
Ω÷–£∫dn-1£¨n «tn-1µΩtn ±øÃ≥µ¡æ–– ªπ˝µƒæý¿Î£¨¶ÿn-1£¨n «tn-1µΩtn ±øÃ≥µ¡æ–– ª»°œÚµƒ±‰ªØ¡ø(dn-1£¨n∫Õ¶ÿn-1£¨næ˘”…≥µ‘ÿŒª“∆¥´∏–∆˜∫ÕΩ«ÀŸ∂»¥´∏–∆˜Ã·π©)°£»°≥µ¡æµ±«∞∂®ŒªŒª÷√p0(x£¨y)‘⁄∫Ú—°¬∑∂Œ…œµƒÕ∂”∞µ„p°‰0(x°‰£¨y°‰)Œ™tn ±øÃDRÕ∆À„∂®Œªµƒ≤ŒøºŒª÷√£¨»°∫Ú—°¬∑∂Œ»°œÚŒ™tn ±øõƒ≤Œøº–– ª»°œÚ£¨‘Ú”…DRÕ∆À„π´ Ωø…∑¥Õ∆≥ˆ«∞“ª ±øõƒÕ∆À„∂®Œª≤Œøºµ„°£Õ®π˝∂ý¥ŒÕ∆À„º¥ø…ªÒµ√“ª◊È≤Œøºµ„£¨æþà˝¡øø…∏˘æ𠵺 ”¶”√µƒ“™«Û»∑∂®°£’‚¿Ô»°≤Œøºµ„ ˝ƒøŒ™5£¨‘Úø…∂®“Â∫Ú—°¬∑∂Œ”Ϋ∞5∏ˆµ•Œª ±º‰ƒ⁄µƒDR∂®ŒªπϺ£∆Ωæ˘æý¿Î≤Ó(µ•Œª£∫m)Œ™£∫

…œ ˆ¡• Ù∫Ø ˝µƒÕº–Œ»ÁÕº1∫ÕÕº2À˘ æ°£
“‘…œ ˆ¡• Ù∂»∫Ø ˝Œ™ª˘¥°£¨æÕø…“‘∂‘∫Ú—°¬∑∂Œ «µ±«∞≥µ¡æÀ˘‘⁄¬∑∂Œµƒø…ƒÐ–‘◊ˆ≥ˆ◊€∫œ∆¿≈–°£“‘∏√ø…ƒÐ–‘◊˜Œ™¬€”ÚU£¨∆‰‘™Àÿu”ά€”ÚX£¨Y∫ÕZµƒµ—ø®∂˚≥Àª˝ºØ£∫

À¸µƒ‘™Àÿ(x£¨y£¨z)œý∂‘”¶£¨º¥u”λ˝∏ˆ“ÚÀÿ”–πÿ°£“Ú¥À£¨‘⁄∂‘uΩ¯––ƒ£∫˝∆¿≈– ±£¨“ÚÀÿºØø…“‘»°Œ™E={X£¨Y£¨Z)£¨∆¿”ÔºØø…»°Œ™F={¥Û£¨–°)£¨◊€∫œ∆¿≈–∞¥œ¬√ʵƒ≤Ω÷ËΩ¯––£∫
(1)∂‘uΩ¯––µ•“ÚÀÿ∆¿º€£¨»ª∫Û¿˚”√∆‰Ω·π˚ππ‘Ï±Ì æE”ÎF÷ƺ‰ƒ£∫˝πÿœµµƒƒ£∫˝æÿ’Û°£…Ë∂‘“ÚÀÿX£¨Y£¨Zµƒµ•“ÚÀÿ∆¿º€Ω·π˚∑÷±Œ™ƒ£∫˝œÚ¡øR1=[¶Ãhh(x)£¨¶Ãhc(x)]£¨R2=[¶Ãdh(y)£¨¶Ãdc(y)]∫ÕR3=[¶Ã°˜dh(z)£¨¶Ã°˜dc(z)]£¨‘ÚΩ´“‘…œƒ£∫˝œÚ¡ø∫œ‘⁄“ª∆±„µ√µΩ±Ì æE”ÎF÷ƺ‰ƒ£∫˝πÿœµµƒƒ£∫˝æÿ’Û

(2)»∑∂®»®œÚ¡øP=[p1£¨p2£¨p3]£¨∆‰÷–p1£¨p2£¨p3∑÷±±Ì æ“ÚÀÿx£¨y£¨z‘⁄¬“÷–µƒ÷ÿ“™≥Ã∂»£¨p1+p2+p3=1°£
(3)◊˜ƒ£∫˝±‰ªªQ=P°„R£¨À˘µ√ƒ£∫˝œÚ¡øQæÕ «±ª∆¿≈–∂‘œÛU‘⁄∆¿”ÔºØ∫œF…œµƒ∆¿≈–Ω·π˚£¨∆‰2∏ˆ∑÷¡ø±Ì æ∫Ú—°¬∑∂Œ «≥µ¡æÀ˘‘⁄¬∑∂Œµƒø…ƒÐ–‘¥Û–°µƒ≥Ã∂»°£
‘⁄“‘…œ◊€∫œ∆¿≈–À„∑®÷–£¨ƒ£∫˝æÿ’Û≥À∑®"°„"≤…”√ºÚµ•µƒº”»®∆Ωæ˘–ÕÀ„◊”(®í£¨°¡)“‘±„ πΩ·π˚ºÊπÀ∏˜÷÷“ÚÀÿ°£”…”⁄»®œÚ¡øµƒ∑÷¡ø÷Æ∫ÕŒ™1£¨‘ÀÀ„®íÕÀªØŒ™“ª∞„µƒ µ ˝º”∑®£¨“Ú¥ÀÀ„◊”(®í£¨°¡)“≤ø…“‘∏ƒ–¥≥…(+£¨°¡)°£‘⁄’‚÷÷«Èøˆœ¬£¨ƒ£∫˝æÿ’Ûµƒ≥À∑®”Î∆’Õ®æÿ’Ûµƒ≥À∑®ÕÍ»´“ª—˘°£
”–¡À∂‘∫Ú—°¬∑∂Œ «µ±«∞≥µ¡æ–– ª¬∑∂Œµƒø…ƒÐ–‘µƒ∆¿º€£¨æÕø…“‘∂‘“‘∫Ú—°¬∑∂ŒŒª÷√Œ™≤ŒøºΩ¯––µÿÕº∆•≈‰–Þ’˝∫Ûµƒ∂®ŒªΩ·π˚µƒø…–≈∂»◊ˆ≥ˆ∆¿º€°£∆¿≈–÷–£¨”¶øº¬«µΩ∫Ú—°¬∑∂Œ”Ϋ∞“ª ±øÃ∆•≈‰¬∑∂Œµƒ¡¨Õ®–‘£¨Œ™¥À‘Ÿ“˝»Î“‘œ¬πÊ‘Ú£∫»Áπ˚∫Ú—°¬∑∂ŒæÕ ««∞“ª ±øÃ∆•≈‰¬∑∂ŒªÚ’þ”Ϋ∞“ª ±øõƒ∆•≈‰¬∑∂Œœý¡¨Õ®£¨‘Ú¿˚”√∏√∫Ú—°¬∑∂Œ–Þ’˝∂®ŒªΩ·π˚µƒø…–≈∂»∏þ°£“‘–Þ’˝Ω·π˚Œ™∆¿≈–∂‘œÛ£¨»°∆¿≈–÷∏±Íæÿ’ÛŒ™(Q£¨Q°‰)£¨∆‰÷–Q «∫Ú—°¬∑∂Œµƒø…ƒÐ–‘∆¿º€æÿ’Û£¨Q°‰ «¡¨Õ®–‘∆¿º€æÿ’Û£¨µ±∫Ú—°¬∑∂Œ”Ϋ∞“ª ±øÃ∆•≈‰¬∑∂Œ”–¡¨Õ®πÿœµ ±£¨Q°‰»°Œ™«∞“ª ±øÃ∆•≈‰¬∑∂Œµƒø…ƒÐ–‘∆¿º€æÿ’Û£¨∑Ò‘Ú“‘0æÿ’Û»°¥˙°£»°∆¿≈–»®œÚ¡øŒ™P°‰=[p°‰1£¨p°‰2£¨p°‰3£¨p°‰4]£¨∆‰∑÷¡ø∑÷±∂‘”¶”⁄Q∫ÕQ°‰µƒ∏˜∏ˆ∑÷¡ø£¨«“p°‰1+p°‰2+p°‰3+p°‰4=1°£Ω´÷∏±Íæÿ’۔λ®œÚ¡øœý≥À£¨µ√¶Ã=p°‰°„[Q£¨Q°‰]T£¨≥∆¶Ã «–Þ’˝∂®ŒªΩ·π˚µƒø…–≈∂»£¨À¸Œ™ÃÙ—°◊Óº—∆•≈‰¬∑∂ŒÃ·π©¡À√˜»∑µƒ“¿æð°£
4 µ—ÈΩ·π˚
Ωª≤ʬ∑ø⁄ «µÿÕº∆•≈‰π˝≥Ã÷–◊Ó“◊≥ˆ¥Ìµƒµÿ∑Ω∏˘æð±æŒƒÃ·≥ˆµƒ∏ƒΩ¯µƒµÿÕº∆•≈‰À„∑®¿Ì¬€£¨æÕΩª≤ʬ∑ø⁄Œ Â◊ˆ–‘ƒÐ∑÷Œˆ£¨œ¬√Ê∑÷¡Ω÷÷«ÈøˆÃ÷¬€°£
µ⁄“ª÷÷«Èøˆ£∫≥µ¡æ÷±––Õ®π˝Ωª≤ʬ∑ø⁄£¨»ÁÕº3À˘ æ°£
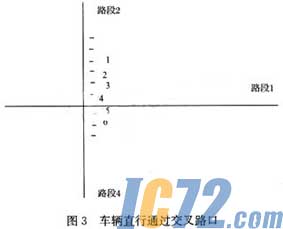
πϺ£µ„4£¨5øøΩ¸¬∑∂Œ1£¨µ´πϺ£µ„1°¢2°¢3°¢4°¢5ƒ‚∫œÀ˘µ√÷±œþ‘∂‘∂∆´¿Î¬∑∂Œ1£¨øøΩ¸¬∑∂Œ2£¨“Ú∂¯πϺ£µ„5ª·’˝»∑∆•≈‰µΩ¬∑∂Œ2£¨≤ªª·±ª¥ÌŒÛµÿ∆•≈‰µΩ¬∑∂Œ1°£Õ¨¿Ì£¨πϺ£µ„4“≤’˝»∑µÿ∆•≈‰µΩ¬∑∂Œ2°£”…”⁄øº¬«¡ÀπϺ£µƒ¡¨–¯–‘£¨∫Õª˘”⁄Œª÷√µ„÷±Ω”Õ∂”∞À„∑®±»∆¿¥£¨±æŒƒµƒÀ„∑®≤ª»ð“◊‘⁄Ωª≤ʵ„≥ˆœ÷∆•≈‰¥ÌŒÛµƒ«È–Œ°£
µ⁄∂˛÷÷«Èøˆ£∫≥µ¡æπ’Õ‰Õ®π˝Ωª≤ʬ∑ø⁄£¨»ÁÕº4À˘ æ°£
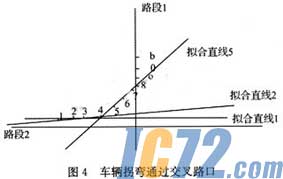
πϺ£µ„1°¢2°¢3°¢4°¢5ƒ‚∫œµ√µΩµƒƒ‚∫œ÷±œþ1”ά∑∂Œ2µƒº–Ω«–°”⁄30∂»£¨µ„5±ª∆•≈‰µΩ¬∑∂Œ2°£Õ¨¿Ì£¨2°¢3°¢4°¢5°¢6ƒ‚∫œµ√µΩµƒƒ‚∫œ÷±œþ2”ά∑∂Œ2µƒº–Ω«“≤–°”⁄30∂»£¨µ„6±ª∆•≈‰µΩ¬∑∂Œ2°£¥”Õº…œø…“‘ø¥≥ˆ£¨µ„5°¢6°¢7°¢8°¢9ƒ‚∫œµ√µΩµƒƒ‚∫œ÷±œþ5”ά∑∂Œ1°¢2µƒº–Ω«∂º¥Û”⁄30∂»£¨”…À„∑®ª˘±æ‘≠¿Ìø…÷™£¨9≤ª∑˚∫œ∆•≈‰Ãıº˛£¨≤ª”Ë∆•≈‰°£∞¥’’Õ¨—˘∑Ω∑®∂‘∆‰À˚µ„“ª“ªΩ¯––∆•≈‰°£æ°πБ⁄Ωª≤ʬ∑ø⁄∏ΩΩ¸ª·”–…Ÿ ˝µƒπϺ£µ„≤ªƒÐ±ª∆•≈‰£¨µ´∆•≈‰≥ˆ¿¥µƒπϺ£ƒÐ∑¥”≥≥µ¡æµƒ µº –– ªπϺ££¨Ωœ∫√µÿ¥¶¿Ì¡ÀΩª≤ʬ∑ø⁄µƒµÿÕº∆•≈‰Œ °£
Œ™—È÷§Œƒ÷–÷≥ˆµƒµÿÕº∆•≈‰À„∑®∂‘µº∫ΩœµÕ≥∂®Œªæ´∂»µƒ”∞œÏ£¨¿˚”√∏√À„∑®∂‘≈Ð≥µ µ≤‚ ˝æðΩ¯––¡À µ—È°£∆•≈‰Ω·π˚±Ì√˜£¨æ¯¥Û∂ý ˝(>96£•)∂®Œª ˝æð∂ºƒÐœý∂‘◊º»∑µÿ∆•≈‰µΩµ¿¬∑…œ£¨∆•≈‰∫Ûµƒ∂®Œªæ´∂»µ√µΩ÷∏þ£ª∆•≈‰À„∑® µœ÷¡À µ ±£¨ƒÐπª¬˙◊„ µº –Ë“™(1¥Œ£Øs)£ª‘⁄GPS ÐµΩ“ª∂®≥Ã∂»µƒ’⁄µ≤ ±œµÕ≥ƒÐπª’˝≥£ ∂±≤¢«“∆•≈‰°£
|