�� ��
�����˼����ں϶���е�����ڡ�����������������˹����ܵ�����ѧ�Ƶ������뼼�����ǵ�������ǰ�����������ۺ��塣
�ƶ��ͻ�������Ҫ���ڶ�һЩΣ�պ�δ֪�ĵ������̽����������̽�����ǵر��������������ȶ���Ҫʹ�õ��ƶ��ͻ����ˡ�������Զ�̿����ƶ����������ھ��н�ǿ�Ļ���������õĿɿ��Ե��ص㣬�ڹ�ũҵ�������ȸ���������й㷺��Ӧ��ǰ�����ڰ�����Զ�̿����ƶ������˵Ŀ��Ʋ����У���Ҫ�˵IJ��롣�����Ҫ��һ���˻�����ͨ�������˵�ָ��ݸ�������ִ�У�ͬʱ������Ҳ���Ѳɼ������ֳ���Ϣ������ˡ����Ļ����ƶ�������ԭ������������������������ƶ������˵�Ӳ��ϵͳ����ϸ�����˻���GPRS������Զ�̿������������ʵ�֡�
1 Զ�̿����ƶ�������ϵͳ���
ϵͳ������Զ�̿���ƽ̨�����ߴ��������Լ����ػ�����С����������ɡ�DSP�DZ��ػ�����С���Ŀ��ƺ��ġ�TI��˾��TMS320LF2407AоƬ���иĽ��Ĺ���ṹ��ϵ����������ˮ�������ŵ㣬���Ҳ����˸����ܾ�̬CMOS����������оƬ���е�ѹ���͵�3.3V����������оƬ�Ĺ��ġ���CPU���кܸ��ô����ٶȣ�Ƶ�ʿ��Դﵽ40 MHz���ܶิ�ӵ��㷨��ϵͳ�����е���ʵʩ�����⣬����������32 KB���桢16����������(PWM)ͨ����1��CANģ�飬�Լ�1�������ٵ�500 ns��10λģ��ת����(ADC)�ȹ���ǿ������衣
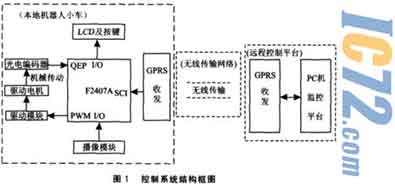
����ϵͳ��F2407AΪ�������ĺ��ģ���չ�˻����˱�����˻��ӿ�(LCD��ʾ������)ģ�顢�����z��ģ�顢�������ģ�顢������������ģ���Լ�GPRS�˻�����ģ��ȡ�����ϵͳ�ṹ��ͼ��ͼ1��ʾ��
1.1 ������С���Ķ�λģ��
�����˶�λģ����Ҫ�ɵ������������·����е����ϵͳ��������������ɡ������ֺ�������֮����ó��ִ�����������ΪI�����������ķֱ���ΪN(��������ÿ��תһ�������������)�������ֵİ뾶Ϊr���������ÿ���һ�����壬��Ӧ�������ڵ����߹��ľ���Ϊ
������Ʋ�����������(PWM)�ĵ��ٷ�ʽ������DSP�Դ���������������(QEP)��·�ɼ����������ķ�����Ϣ���Ե�����бջ�PID���ơ�����QEP��·�����������ķ����źſ��Լ���ı��ƣ�ͬʱ����PID����ԭ�����������ϵͳ�Ŀ��ƾ��Ⱥ��ȶ��ԡ�
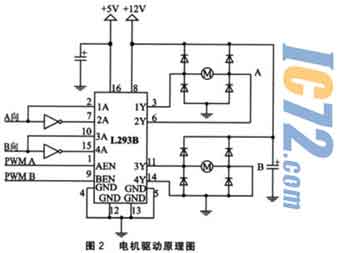
�������ԭ��ͼ��ͼ2��ʾ��������оƬΪL293B��L293Bֱ���������оƬ������ѹ��Χ��4.5~36V��������������(˫��H�ż��ɹ��ŵ�·)������·������ͨ����������Եĵ���ṩl A�������������������оƬ���ȣ�оƬ�ܹ��Զ��ضϣ�����ϵͳ��������A��B��Ϊ�ߵ�ƽʱ������A��B�����ֱ���3������6�ź�11������14�ţ������ת����֮����A��B��Ϊ�͵�ƽʱ����������ֱ���6������3�ź�14������11�ţ������ת����ʱ��������PWM����оƬ�ϵ��ʹ�ܽŵ�ͨ��ʱ������Ե�����е��٣�F2407A��DSPоƬ֧��PWM�������˿��Ժܷ���ض�����������е��١�
����DSPоƬ�Դ���������������ģ�飬��˸ò��ֵĵ�·��ƱȽϼ�����������������������źž������ż����ȶ�������DSPоƬ��QEP��·��CPU����ʶ���ٽ�ʶ������Ϣ��ΪPID�����㷨�ķ������롣
1.2 LCD��ʾ������ģ��
LCD��ʾģ�������ģ������ݸ�ʽ����8λ���뵥Ƭ�����������Ľӿ������z��ģ����������ѹ�����JPEG��ʽͼ�������������С�������˿��������ݴ����ĸ�����ͬʱ������GPRS����һ֡ͼ���ʱ�䣬ʵʱ�Ը��á�F2407A�ṩ�˷ḻ��I��O�ӿڣ���I/O�ڿ��Ժܷ���ض�LCDģ�������ģ��������ݵ�д��Ͷ�ȡ������LCDģ���������д��ģ�������ģ��������Ƕ����ģ���˿��Է�ʱ����ͬһ��I/O�ڣ������ᷢ����ͻ������ƣ��ò�ͬ�Ŀ����߷ֱ����������ģ���ʹ�ܶ���ʵ�ַ�ʱ���ã�����DSP��I��OPB0~I��OPB7��Ϊ���ǵ����ݽӿڡ�
2 GPRS����ͼ����
GPRS(General Packet Radio Selvice)��һ�ֻ��ڰ�������ͨ�ŷ�������һ���µ�GSM����ҵ���Ը��ƶ��û��ṩ���߷������ݽ��˷���GPRS��Ҫ�Ǹ��ƶ��û���Զ�˵���������֮���ṩһ�����ӣ��Ӷ����ƶ��û��ṩ��������IP������X.25ҵ��
GPRS���ݴ�����ŵ��ǣ�
�������ʸߣ�
��ʵʱ���ߣ�
�������շѣ�
���ܾ���Զ����Ӱ�죻
���ݵ�¼��
2.1 ͼ�����ݲɼ���������ͼ
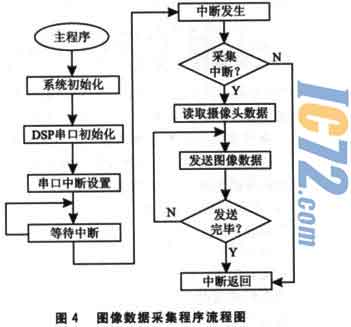
ͼ��ɼ����̰���DSP����ͨ�ų�ʼ����ͼ�����ݷ������֡�������ķ����ɼ�ͼ��ָ���GPRSģ����źŴ����DSP���ڣ�����DSP���ڵ��жϷ��ɼ��z��ͷͼ�����ݣ�������GPRSģ�齫���ݷ���Զ�̼�����ģ����һ֡ͼ��IJɼ����ڡ�ͼ�����ݲɼ�����������ͼ4��ʾ��
2.2 GPRS������ʽ
�ڱ�ϵͳ�У�����GPRS�ƶ�ͨ������ʵ����Ϣ��˫���䡣������С������Զ�̼��ƽ̨��������Ҫ�����ֳ�ͼ����Ϣ��С����ǰ��λ��Ϣ��Զ�̼��ƽ̨����С������Ҫ��ָ����Ϣ��
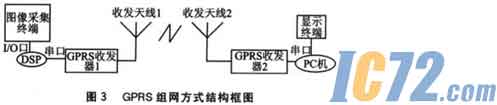
GPRSͼ��ɼ�ģ���ɲɼ��նˡ�DSP��Χ�ӿڡ�GPRS�շ�����PC���ӿڼ��������������ɡ�ͼ�����ݾ��ɼ�����DSP���ڴ����GPRS�շ���1�����շ���l��ͼ������ͨ��GPRS�������緢�ͳ�ȥ������GPRS�շ���2�����յ���ͼ�����ݴ����PC�����ڣ����ż������������PC�����ڶ�ȡ���ݲ�������ʾ�ڼ�����Ľ����ϣ�����ֳ���ʵʱ��ء�GPRS������ʽ�ṹͼ��ͼ3��ʾ��
DSPоƬ���������֧��C���ԡ���������Լ�����ϱ�̣����ڱ�ϵͳ�漰��ͼ�����ݴ��������PID�����㷨��ʵ�ֺ�LCD��ʾ�ȣ������ӣ���̹�����������û�ϱ�̵ķ��������ԽϺõؽ��C���Ժͻ�����Ե��ŵ㣬��д��Ч�ʽϸߵij�����롣
2.3 ���ݴ���Э��
���ݴ���Э���Ϊ�����֣�һ������ʬC������DSP�Ŀ���ָ���һ������DSP����PC���ķ�����Ϣ�����ݵĴ����ʽ�������ݰ���ʽ����˱����ÿ����Ҫ���͵����ݽ��д����������������ݰ���������:

�������ݰ��ĸ���Ԫ�������£�
����ʼ��־λ��һ���ֽڣ��̶�ֵ0x00��
���������һ���ֽڣ�ֵ��ΧΪ0x0l~0xff������������������ͼ�2.3.1��2.3.2��
�����ݳ��ȵ�Ԫ�������ֽڣ�ֵ��ΧΪ0x0001~0xffff�����е��ֽ���ǰ�����ֽ��ں�ʾ���������ݵ��ֽ�����
����������ݵ�Ԫ���ֽ��������������ɾ��巢�͵��������ݾ�����
������У�鵥Ԫ��һ���ֽڣ�ֵΪ���������ݵĸ����ֽ������ó���
�������־λ��һ���ֽڣ��̶�ֵΪ0x01��
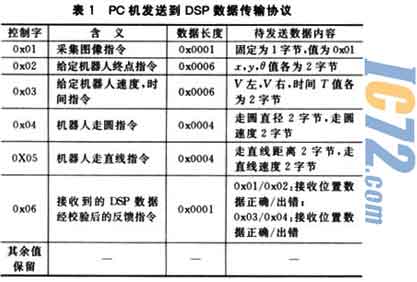
2.3.1 PC����DSP�����ݴ���Э��
PC������������DSP���������Ͱ����ɼ�ͼ��ָ������������������ͺ�Ӧ����ָ��ȡ�DSP���յ�PC���ͳ��ĸ���ָ���ȡ�������ݣ�Ȼ����������ݵĸ����ֽ�������ٰ������ó���ֵ����յ���У������бȽϣ����������PC�������ݽ�����ȷ������ת���Ӧָ����жϷ�����������������PC���������ݽ��ճ������������·���ָ���ָ������1���С�
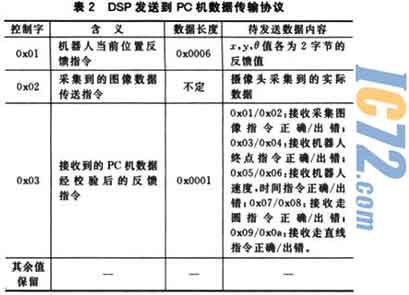
2.3.2 DSP��PC�������ݴ���Э��
DSP���͵�PC��������������Ҫ���������˵�ǰλ�÷������ݡ�ͼ�������Լ�DSPӦ����ָ��ȡ�PC�����յ����ݺ���У��Ĵ������̺��Ͻڽ��ܵ�DSP�������ݺ�Ĵ�������һ����������С�������ߵĹ����У�ÿ��һ��ʱ��Ὣ������ǰλ�õ����ݷ��͵�PC����ʵ��ʵʱ·�����٣�ͬʱ��DSP���յ���λ�������IJɼ�ͼ��ָ�����ͼ��ɼ���Ȼ��Ѳɼ�����ͼ�����ݷ���PC������ͼ����ʾ��ʵ���˻�����С����Χ������Ϣ�Ŀ��ơ�
3 ʵ����
���������������Delphi�����Ա��ơ��ڡ�����ָ�һ��������Ol��Ol�����ɼ�ͼ��ָ���������� �͡�������ؽ���ġ�ͼ���ء�������ʾ����ͷ�ɼ�����Զ�̻�����Ϣ��
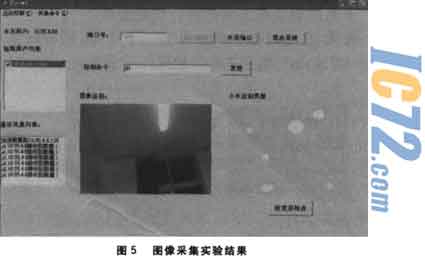
ʵ��ʱ���z��ͷ�ķֱ��ʵ���Ϊ320��240������GPRS�շ����ֱ������4 m���ҵķ������ˣ�ͼ5��ʾ��ʵ������ʵ��������������GPRS�ƶ�ͨ�������DSP�����İ������ƶ�������Զ��ϵͳ�ﵽ��Ԥ�ڵ�Ч����ͬʱ��ʵ����Ҳ���֣�GPRS�������ݵ�ʵʱ�������ģ���Ȼ�����ϴ������ʸߴ�171 kb��s����ʵ�����ܶ������ص�Ӱ�죬ʵ�����ʽϵͣ�����һ֡3K��JPEG��ʽͼ���Լ��Ҫ3O~60s��ʱ�䡣��ˣ���ν�һ�����ϵͳ��ʵʱ���DZ�ϵͳ���ٵ������ս��

|