1 ТэСФ
ТФЦұЙэ»ъ(УРИЛ»ъ»тОЮИЛ»ъ)ОӘЖҪМЁЈ¬АыУГҝЙјы№віЙПсәНәмНвіЙПсҙ«ёРЖчјјКхЈ¬ҝЙТФЦзТ№ҪшРРФ¶ҫаАлЎўҙуГж»эАЧіЎХмІмј°ЖдЛыХП°ӯМеПөөДХмІмЎЈөұ»ъФШАЧіЎХмІмПөНіЦҙРРИООсКұЈ¬ПөНі¶ФҪУКХөДАЧіЎНјПсҪшРРGPSұк¶ЁЈ¬Н¬КұҪ«ұк¶ЁөДНјПсКөКұС№ЛхЎўҙжҙўәНҙ«КдЎЈёГПөНіҫЯУРј«ёЯөДКөКұРФТӘЗуЎЈТтҙЛЈ¬ҝјВЗФЪПөНіЦРІЙУГЛ«DSPәНёҙФУҝЙұаіМВЯјӯЖчјю(CPLD)ОӘәЛРДАҙ№№ҪЁёЯЛЩҙҰАнМеПөЎЈТ»·ҪГжЈ¬ІЙУГЛ«DSPМеПөҪб№№ҝЙТФК№ПөНіҫЯұёј«ёЯөДФЛЛгҙҰАнЛЩ¶ИЈ¬ВъЧгКөКұРФТӘЗуЈ¬БнТ»·ҪГжЈ¬CPLDөДТэИлК№ПөНіөДБй»оРФөГөҪБЛәЬҙуөДМбёЯЎЈҪ«¶юХЯҪбәПҝЙК№ёГПөНіід·ЦМеПЦРВТ»ҙъНјПсС№ЛхПөНіёьҝмЛЩЎўёьБй»оөДМШөгЎЈ
2 TMS320C62XXПөБРDSPөДМШөг
ёщҫЭНјПсС№ЛхәНҙжҙўПөНіөДМШөгЈ¬ІЙУГГА№ъөВЦЭТЗЖч(TI)№«ЛҫөДTMS320C62xxПөБР¶ЁөгDSPЧчОӘәЛРДҙҰАнЖчЎЈЖдЦчЖөОӘ200 MHz~300 MHzЈ¬КэҫЭҙҰАнДЬБҰОӘ1600 MI/s~2400 MI/sЎЈЛьөДЦчТӘМШөгИзПВЈә
(1)DSPДЪәЛІЙУГі¬іӨЦёБоЧЦ(VLIW)МеПөҪб№№Ј¬8ёц№ҰДЬөҘФӘ№ІУГ32ёц32 bitНЁУГјДҙжЖчЈ¬Чо¶аҝЙФЪТ»ёцЦЬЖЪДЪН¬КұЦҙРР8Мх32О»ЦёБоЈ¬ҙУ¶шҙуҙуМбёЯБЛіМРтөДЦҙРРЛЩ¶И;
(2)өзВ·ДЪІҝјҜіЙБЛl MbitЎ«7 MbitЖ¬ДЪSRAMЈ¬·ЦОӘДЪІҝіМРт/CacheҙжҙўЖчәНДЪІҝКэҫЭ/CacheҙжҙўЖчЈ¬І»ҙжФЪЖ¬ДЪҙжҙўЖчУлНвІҝҙжҙўЖчөДЧЬПЯҫәХщәН·ГОКЛЩ¶ИІ»ЖҘЕдОКМвЈ¬ТтҙЛ·ГОКЛЩ¶ИҝмЈ¬ҝЙТФід·ЦАыУГDSPЗҝҙуөДКэҫЭҙҰАнДЬБҰ;
(3)ҫЯУР32 bitНвІҝҙжҙўЖчҪУҝЪ(EMIF)Ј¬НвІҝҙжҙўЖчҝЙС°Ц·ҝХјдёЯҙп52 MByteЎЈҝЙУлSDRAMәНSBRAMКөПЦОЮ·мБ¬ҪУЈ¬УГУЪҙуИЭБҝёЯЛЩҙжҙўЎЈЖдЦұҪУТмІҪҙжҙўЖчҪУҝЪҝЙУлSRAMәНEPROMБ¬ҪУЈ¬УГУЪРЎИЭБҝКэҫЭҙжҙўәНіМРтҙжҙўЎЈ
3 ПөНіУІјюЙијЖ
°ҙ№ҰДЬ»®·ЦЈ¬НјПсС№Лхј°ҙжҙўПөНі°ьАЁНјПсІЙјҜДЈҝйЎўGPSКэҫЭІЙјҜДЈҝйЎўCPLDВЯјӯҝШЦЖДЈҝйЎўЛ«ҝЪRAM+Л«DSPНјПсҙҰАнДЈҝйЎўНјПсКөКұҙжҙўДЈҝйәНС№ЛхКэҫЭКдіцДЈҝйЎЈ
ОӘВъЧгПөНіКөКұРФТӘЗуЈ¬ХыёцПөНіөДЙијЖК№УГ3ёцDSPЈ¬ЖдЦР1ёцУГУЪС№ЛхКэҫЭөДКөКұҙжҙўЈ¬2ёцІЙУГј¶БӘ·ҪКҪ№ӨЧчөДDSPУГУЪАЧіЎНјПсөДКөКұС№ЛхәНҙ«КдЎЈПөНіҪб№№ИзНјlЛщКҫЎЈ
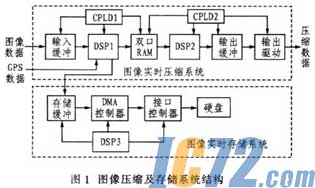
DSPlҪУКХіЙПсЙиұёІъЙъАЧіЎНјПсКэҫЭәНGPS¶ЁО»ПөНіІъЙъ¶ЁО»КэҫЭЈ¬ІўёщҫЭGPS¶ЁО»КэҫЭұк¶ЁАЧіЎНјПсЈ¬И»әу¶Фұк¶ЁәуөДНјПсҪшРРКөКұС№ЛхЎЈDSP2¶ФС№ЛхәуөДАЧіЎНјПсТАҙОҪшРРБҝ»ҜЦШЕЕЎўРЕФҙұаВләНРЕөАұаВлЈ¬ІўҪ«ұаВләуөДНјПсНЁ№эКэҙ«»ъ·ўЛНөҪөШГжЎЈDSP3ЦчТӘёәФрҝШЦЖС№ЛхКэҫЭөДКөКұҙжҙўЎЈ
3.1 НјПсІЙјҜДЈҝй
ұҫПөНіІЙУГНј1ЛщКҫөДDSPlөДEMIFАҙКөПЦУлҝЙјы№віЙПсҙ«ёРЖчәНәмНвіЙПсҙ«ёРЖчЦ®јдөДНЁРЕЈ¬ІЙјҜАЧіЎөДҝЙјы№вНјПсәНәмНвНјПсРЕПўЎЈУЙУЪDSPlөДEMIFҪУҝЪКЗ32О»Ј¬¶шНјПсКэҫЭөДКдИлЧЦҝнОӘ8О»Ј¬ОӘБЛід·ЦАыУГDSPөДЧКФҙЈ¬К№ПөНіВъЧгҝмЛЩҙ«КдҙҰАнөДТӘЗуЈ¬ЙијЖКұФЪҙ«ёРЖчәНDSPlЦ®јдК№УГ4ёц8О»ТмІҪFIFOҙжҙўЖчЧчОӘНјПсКэҫЭөДКдИл»әіеЎЈFIFOУлEMIFЦ®јдөДУІјюҪУҝЪИзНј2ЛщКҫЎЈ
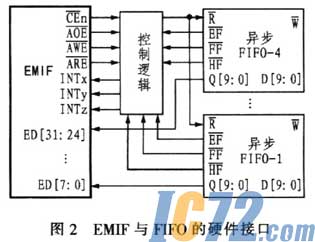
Нј2ЦРөДҝШЦЖВЯјӯНЁ№эНјlөДCPLDlАҙКөПЦЎЈCPLD1ёщҫЭПөНіЛщРиТӘөДКұРтЈ¬ҝШЦЖІъЙъEMIFөДЖ¬СЎРЕәЕ(CEn)ЎўТмІҪКдіцФКРнРЕәЕ(AOE)ЎўТмІҪРҙФКРнРЕәЕ(AWE)ЎўТмІҪ¶БФКРнРЕәЕ(ARE)Ј¬Н¬КұНЁ№эҪУКХFIFOөДҝХұкЦҫ(EF)ЎўВъұкЦҫ(FF)ј°°лВъұкЦҫ(HF)АҙІъЙъDSPөДЦР¶ПРЕәЕ(INTxЎўINTyЎўINTz)Ј¬ҙУ¶шКөПЦ4ёцТмІҪFIFOөД¶БРҙІЩЧчЎЈ
3.2 GPSКэҫЭІЙјҜДЈҝй
НЁ№эёчЦЦ№вС§ЙиұёЕДЙгөҪөДАЧіЎНјПсұШРлұк¶ЁЙППаУҰөДөШАнЧшұкРЕПўІЕДЬК№ЖдҫЯУРКөјКТвТеЎЈТтҙЛЈ¬ПөНіөДКдИлКэҫЭіэБЛАЧіЎНјПсКэҫЭНв»№УҰ°ьә¬ПаУҰөДGPS¶ЁО»КэҫЭЎЈ
УЙGPS¶ЁО»ПөНіёщҫЭОұҫаІо·Ц¶ЁО»ФӯАнјЖЛгіцөДGPS¶ЁО»КэҫЭ°ҙХХХыГлКдіцЈ¬КдіцҪУҝЪОӘRS-232РНҙ®РРҪУҝЪЎЈTMS320C62xxПөБРDSPҙшУР3ёц¶аНЁөА»әіеҙ®ҝЪ(McBSP0ЎӘЎӘMcBSP2)Ј¬ҝјВЗөҪMcB-SPҙ®ҝЪөДөзЖшМШРФУлRS-232ҙ®ҝЪөДөзЖшМШРФЦ®јдҙжФЪІоТмЈ¬ЙијЖКұФЪDSPIөДMcBSPҪУҝЪЙПНвҪУ1ёцRS-232КХ·ўЖчЈ¬ТФұгКөПЦҙ®ҝЪНЁС¶Ј¬ҪУКХGPS¶ЁО»КэҫЭЎЈ
3.3 CPLDВЯјӯҝШЦЖДЈҝй
ОӘБЛРӯөчПөНіЦРГҝёц№ҰДЬ¶АБўөДөзВ·ёЯР§ВК№ӨЧчЈ¬К№УГБЛ2ёцёҙФУҝЙұаіМВЯјӯЖчјю(CPLD)ҝШЦЖDSPДЪІҝ¶а¶ОДЪҙжҝХјдөД·ГОКЈ¬Іў№ЬАнDSPУлЛ«ҝЪRAMәНFIFOЦ®јдөД·ГОККұРтЎЈ
ҙЛНвЈ¬УЙУЪ№вС§ЙиұёөДКэҫЭКдіцЧЦҝнОӘ8О»ЎўTTLөзЖҪЈ¬¶шDSPөДEMIFҪУҝЪКЗ32О»ЎўLVTTLөзЖҪЎЈТтҙЛЈ¬CPLD»№ұШРлНЁ№эҝШЦЖПаУҰөДҪУҝЪөзВ·АҙҪвҫцТт№вС§ЙиұёУлDSPЦ®јдөДҪУҝЪІоТм¶шІъЙъөДОКМвЈ¬ҙУ¶шұЈЦӨХыёцПөНіУРРтЎўёЯР§өДФЛРРЎЈ
3.4 Л«ҝЪRAM+Л«DSPНјПсҙҰАнДЈҝй
ЧчОӘНјПсС№ЛхәНҙжҙўПөНіөДәЛРДЈ¬НјПсҙҰАнДЈҝйТФЛ«DSPОӘФЛЛгҙҰАнәЛРДөҘФӘЈ¬ІўёЁТФЛ«ҝЪRAMКөПЦ2ёцDSPЦ®јдөДёЯЛЩНЁРЕЎЈ2ёцDSPөДНвІҝҙжҙўЖчҪУҝЪEMIFУлЛ«ҝЪRAMЦ®јдөДҪУҝЪЙијЖИзНј3ЛщКҫЈ¬НјЦРөДЛ«ҝЪRAMІЙУГөДКЗ32О»ТмІҪRAMЎЈ

ФЪНј3ЛщКҫөД2ёцDSPЦРЈ¬DSPlөД№ҰДЬИзПВЈә
ҪУКХАЧіЎФӯКјНјПсКэҫЭәНGPS¶ЁО»КэҫЭ;
¶ФАЧіЎНјПсКэҫЭҪшРРGPSұк¶Ё;
НЁ№эEXBUSҪ«GPSұк¶ЁәуөДНјПсҙжҙўөҪУІЕМЙП;
К№УГҝмЛЩАлЙўУаПТұд»»(FDCT)¶ФGPSұк¶ЁәуөДАЧіЎНјПсҪшРРКөКұС№Лх;
Ҫ«С№ЛхКэҫЭНЁ№эНвІҝҙжҙўЖчҪУҝЪEMIFәНЛ«ҝЪRAMҙ«ЛНёшDSP2ЎЈ
DSP2өДЦчТӘ№ҰДЬИзПВЈә
НЁ№эНвІҝҙжҙўЖчҪУҝЪEMlFәНЛ«ҝЪRAMҪУКХАҙЧФDSPIөДС№ЛхКэҫЭ;
Ҫ«С№ЛхКэҫЭБҝ»ҜЦШЕЕ;
¶ФБҝ»ҜЦШЕЕәуөДС№ЛхКэҫЭҪшРРРЕФҙәНРЕөАұаВл;
Ҫ«ұаВләуөДКэҫЭНЁ№эКэҙ«Йиұё·ўЛНёшҪУКХХҫЎЈ
ЧчОӘ2ёцDSPЦ®јдёЯЛЩНЁРЕЗЕБәөДЛ«ҝЪRAMКЗТ»ёц№ІПнКҪ¶а¶ЛҝЪҙжҙўЖчЈ¬ЛьЕдұё2МЧ¶АБўөДөШЦ·ПЯЎўКэҫЭПЯәНҝШЦЖПЯЈ¬ФКРн2ёц¶АБўөДDSPН¬КұТмІҪөШ·ГОКҙжҙўөҘФӘЈ¬ҙУ¶шКөПЦҙжҙўКэҫЭөД№ІПнЈ¬ҙуҙуМбёЯБЛ2ёцDSPЦ®јдөДНЁРЕЛЩ¶ИЎЈ
Л«ҝЪRAMДЪІҝөД·ГОКЦЩІГВЯјӯНЁ№эҝШЦЖН¬Т»өШЦ·өҘФӘ·ГОКөДКұРтЎўәПАн·ЦЕдҙжҙўөҘФӘКэҫЭҝйөД·ГОКИЁПЮЎўУРРтөч¶ИРЕБоҪ»»»ВЯјӯ(АэИзЦР¶ПРЕәЕ)өИКЦ¶ОАҙ№ЬАн2ёцDSP¶ФЛ«ҝЪRAMөД¶БРҙІЩЧчЈ¬ҙУ¶шКөПЦDSPIәНDSP2¶ФҙжҙўЖчДЪ№ІПнКэҫЭөДУРРт·ГОКЎЈ
2ёцDSPЛдИ»ДЬНЁ№эЛ«ҝЪRAMҪшРРёЯЛЩНЁРЕЈ¬ө«ЖдҝШЦЖ№ҰДЬІ»ЗҝЈ¬ТтҙЛПөНіЦРРиТӘІЙУГИзНј1ЛщКҫөД2ёцCPLDРӯөчDSPlәНDSP2¶ФЛ«ҝЪRAMЦР№ІПнКэҫЭөД·ГОКЈ¬ҙУ¶шКөКұҝмЛЩөШКөПЦАЧіЎНјПсКэҫЭөДұк¶ЁЎўС№ЛхЎўҙжҙўәНҙ«КдЎЈ
3.5 НјПсҙжҙўДЈҝй
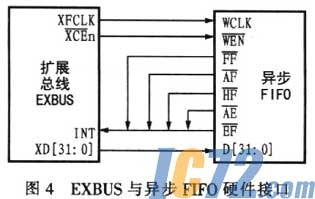
ФӯКјНјПсКэҫЭҫӯ№эGPSұк¶ЁәуҪшРРҙжҙўЈ¬ЧчОӘөШГжҪУКХөДАЧіЎНјПсКэҫЭөДұё·ЭЎЈУЙУЪ№вС§ЙиұёЛщЕДЙгөДАЧіЎКэҫЭҫЯУРөНҝХЎўҙуЛЩёЯұИЎўёЯ·ЦұжВКөДМШөгЈ¬КЗәЈБҝКэҫЭЈ¬ТтҙЛЈ¬ұШРлК№УГУІЕМҪшРРҙжҙўЎЈОӘБЛұЬГвНјlЛщКҫөДDSPIДЪІҝУІјюЧКФҙ·ўЙъіеН»Ј¬К№УГDSPIөДEXBUSЧчОӘНјПсҙжҙўКэҫЭКдіцөДҪУҝЪЎЈ
ҫӯ№эGPSұк¶ЁөДАЧіЎНјПсКэҫЭНЁ№эDSPlөДEXBUSҪУҝЪКЧПИКдіцөҪFIFOЦР»әіеЈ¬И»әу·ЦұрНЁ№эDMAҝШЦЖЖчәНҪУҝЪҝШЦЖЖчҪ«С№ЛхКэҫЭҙжҙўөҪУІЕМЙПЎЈ¶ФУІЕМөДҝШЦЖІЙУГDSP3әНЧЁУГSCSlҪУҝЪҝШЦЖЖчАҙКөПЦКэҫЭөДҙжҙўЎЈEXBUSУлТмІҪFIFOЦ®јдөДУІјюҪУҝЪИзНј4ЛщКҫЎЈ
3.6 С№ЛхКэҫЭКдіцДЈҝй
ҫӯGPSұк¶ЁөДАЧіЎНјПсКэҫЭФЪК№УГМШ¶ЁөДЛг·ЁС№ЛхәуЈ¬ұШРлҙ«ЛНөҪөШГжҪшРРәуЖЪ·ЦОцҙҰАнЎЈС№ЛхКэҫЭҫӯ№эDSP2ұаВләуЈ¬НЁ№эDSP2өДEMIFҙ«ЛНөҪFIFOЦР»әіеЈ¬И»әуНЁ№эЧЬПЯЗэ¶ҜЛНөҪКэҙ«ЙиұёЈ¬ҙ«ЦБөШГжҪУКХХҫЎЈFIFOҙжҙўЖчІЙУГIDT72V06РНТмІҪFIFOҙжҙўЖчЈ¬ЧЬПЯЗэ¶ҜЖчІЙУГSGS-THOMSON№«ЛҫөДHC245РНЧЬПЯЗэ¶ҜЖчЎЈ
4 НјПсС№ЛхЛг·ЁЙијЖ
НјПсС№ЛхЛг·ЁР§ВКөДёЯөНЦұҪУУ°ПмХыёцПөНіөДКөКұРФЈ¬ТтҙЛЈ¬СЎУГәПККөДНјПсС№ЛхЛг·ЁҫЯУРЦБ№ШЦШТӘөДТвТеЎЈ
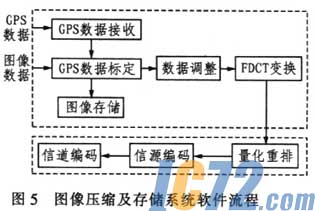
ёГПөНіІЙУГ»щУЪFDCTұд»»өДНјПсС№ЛхЛг·ЁЈ¬ёГЛг·ЁДЬ№»ФЪНјПсЦКБҝұИҪПәГөДЗйҝцПВИЎөГҪПёЯөДС№ЛхұИЈ¬ЗТјЖЛгБҝККЦРЈ¬ДЬ№»ВъЧгНјПсКөКұС№ЛхөДТӘЗуЈ¬ЖдИнјюБчіМИзНј5ЛщКҫЎЈНј5ЦРЙПІҝРйҝтДЪөДЛг·ЁУЙDSPlЦҙРРЈ¬ПВІҝРйҝтЦРөДЛг·ЁУЙDSP2ЦҙРРЈ¬ЦРјдКэҫЭНЁ№эЛ«ҝЪRAMҙ«өЭЎЈ
УЙУЪС№Лх№эөДКэҫЭҫЯУР·ЗіЈөНөДИЯУа¶ИЈ¬ТтҙЛФЪРЕФҙұаВлКұРлККөұІеИлRoI(Restart of Interval)ұкЦҫЈ¬ФцЗҝС№ЛхКэҫЭөДҝ№ОуВлДЬБҰЈ¬ұЬГв·ўЙъОуВлА©ЙўЎЈ
ҙЛНвЈ¬ОӘМбёЯНЁРЕөДҝЙҝҝРФЈ¬ФЪұаВлЦР»№ТӘјУИлРЕөАұаВлЎЈҝјВЗөҪҫн»эВлөДЗ°ПтҫАҙнДЬБҰәНКөКұРФҪПәГЈ¬СЎФсҫн»эВлЧчОӘРЕөАұаВлЎЈҙУАнВЫЙПҪІЈ¬ҫн»эВлөДФјКш¶ИФҪіӨҫАҙнДЬБҰФҪәГЈ¬ө«КЗФјКш¶ИФҪіӨЈ¬ТлВлКұјдТІ»бПаУҰұдіӨЎЈТтҙЛЈ¬ФЪЙијЖКұұШРлҙУКөКұРФіц·ўЈ¬СЎФсәПККөДҫн»эВлФјКш¶ИЈ¬ҙУ¶шұЈЦӨКэҙ«ЙиұёөДОуВлВКҫАҙнДЬБҰДЬ№»ВъЧгПөНіөДКөКұРФЎўҝЙҝҝРФәНҝ№ёЙИЕРФТӘЗуЎЈ
5 ҪбКшУп
ёГПөНіАыУГTMS320C62xxПөБРDSPөДҝмЛЩКэҫЭҙҰАнДЬБҰәНЛ«ҝЪRAMөДёЯЛЩКэҫЭҙ«КдДЬБҰЈ¬¶Ф№вС§ҙ«ёРЖчЕДЙгөҪөДҙуГж»эАЧіЎНјПсҪшРРҝмЛЩGPSұк¶ЁЈ¬Іў¶Фұк¶ЁәуөДНјПсҪшРРКөКұС№ЛхЎўҙжҙўәНҙ«КдЈ¬ҝЙВъЧг»ъФШҙуГж»эАЧіЎХмІмПөНіөДКөКұРФТӘЗуЎЈ |