ТЖ¶Ї»ъЖчИЛТЄ»сµГЧФЦчРРОЄЈ¬ЖдЧоЦШТЄµДИООсЦ®Т»КЗ»сИЎ№ШУЪ»·ѕіµДЦЄК¶ЎЈХвКЗУГІ»Н¬µДґ«ёРЖчІвБїІўґУДЗР©ІвБїЦРМбИЎУРТвТеµДРЕПў¶шКµПЦµДЎЈКУѕхЎўємНвЎўј¤№вЎўі¬ЙщІЁµИґ«ёРЖч¶јФЪТЖ¶Ї»ъЖчИЛЦеõЅКµјКУ¦УГЎЈі¬ЙщІЁґ«ёРЖчТФЖдРФјЫ±ИёЯЎўУІјюКµПЦјтµҐµИУЕµгЈ¬ФЪТЖ¶Ї»ъЖчИЛёРЦЄПµНіЦеõЅБЛ№г·єµДУ¦УГЎЈµ«КЗі¬ЙщІЁґ«ёРЖчТІґжФЪТ»¶ЁµДѕЦПЮРФЈ¬ЦчТЄКЗТтОЄІЁКшЅЗґуЎў·ЅПтРФІоЎўІвѕаµДІ»ОИ¶ЁРФ(ФЪ·Зґ№Ц±µД·ґЙдПВ)µИЈ¬ТтґЛНщНщІЙУГ¶аёці¬ЙщІЁґ«ёРЖч»тІЙУГЖдЛыґ«ёРЖчАґІ№іҐЎЈОЄБЛГЦІ№і¬ЙщІЁґ«ёРЖч±ѕЙнµДІ»ЧгЈ¬УЦДЬМбёЯЖдИЎ»·ѕіРЕПўµДДЬБ¦Ј¬±ѕОДЙијЖУЙТ»МеКЅі¬ЙщІЁґ«ёРЖчУлІЅЅшµз»ъЧйіЙµДМЅІвПµНіЎЈ
1 і¬ЙщІЁґ«ёРЖчµДМЅІвФАнј°·Ѕ·Ё·ЦОц
і¬ЙщІЁґ«ёРЖчµД»щ±ѕФАнКЗ·ўЛН(і¬Йщ)С№Б¦ІЁ°ьЈ¬ІўІвБїёГІЁ°ь·ўЙдєН»ШµЅЅУКХЖчЛщХјУГµДК±јдЎЈ

ЖдЦРЈ¬LОЄДї±кѕаі¬ЙщІЁґ«ёРЖчµДѕаАлЈ»cОЄі¬ЙщІЁІЁЛЩ(ОЄБЛјт»ЇЛµГчЈ¬±ѕОДТФПВМЦВЫµДІвБїѕаАлК±І»їј ВЗІЁЛЩКЬОВ¶ИµДУ°Пм)Ј»tОЄ·ўЙдµЅЅУКХµДК±јдјдёфЎЈ
УЙУЪУГі¬ЙщІЁІвБїѕаАлІўІ»КЗТ»ёцµгІвБїЎЈі¬ЙщІЁґ«ёРЖчѕЯУРТ»¶ЁµДА©ЙўМШРФЈ¬·ўЙдµДі¬ЙщДЬБїЦчТЄјЇЦРФЪЦчІЁ°кЙПЈ¬СШЧЕЦчІЁЦбБЅІаіКІЁАЛРНЛҐјхЈ¬ЧуУТФј30ЎгµДА©ЙўЅЗЎЈКВКµЙПЈ¬КЅ(1)јЖЛг¶ИФЅК±јдµД·ЅКЅКЗ»щУЪі¬ЙщІЁіЙ№¦Ўўґ№Ц±µД·ґЙдГыТеПВЅшРРµДЎЈµ«¶ФУЪТЖ¶Ї»ъЖчИЛєЬДС±ЈЦ¤ЖдЧФЙнФЛ¶ЇЧЛМ¬µДОИ¶ЁРФЈ¬ІЙУГі¬ЙщІЁґ«ёРЖч№М¶ЁФЪТЖ¶Ї»ъЖчИЛіµЙнµДМЅІв·ЅКЅЈ¬µ±ТЖ¶Ї»ъЖчИЛЖ«АлЖЅРРЗЅГжК±Ј¬МЅІвПµНіНщНщєЬДѵõЅКµјКµДѕаАлЎЈБнНвЈ¬і¬ЙщІЁХвЦЦ·ўЙўМШРФФЪУ¦УГУЪІвБїХП°ОпµДК±єтЈ¬Ц»ДЬМṩĿ±кХП°ОпµДѕаАлРЕПўЈ¬¶шІ»ДЬМṩĿ±кµД·ЅПтєН±ЯЅзРЕПўЎЈХвР©И±ПЭ¶јґуґуПЮЦЖБЛі¬ЙщІЁґ«ёРЖчµДКµјКУ¦УГєННЖ№гЎЈ
±ѕОДФЪНЁ№эАнВЫµД·ЦОцєНІ»¶ПµШКФСйµД»щґЎЙПЈ¬ІЙУГЛДПаІЅЅшµз»ъґш¶ЇµҐёцТ»МеКЅі¬ЙщІЁґ«ёРЖчРэЧЄµД·ЅКЅЈ¬ЧйіЙТ»ёц¶ЇМ¬µДёРІвПµНіЎЈ
2 Т»МеКЅі¬ЙщІЁґ«ёРЖчУлІЅЅшµз»ъЧйіЙµДМЅІвПµНі
2.1 Ѕб№№ЙијЖ
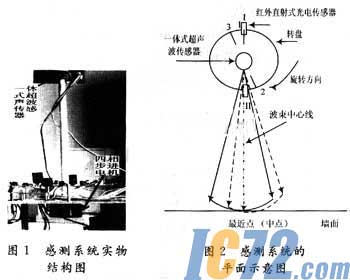
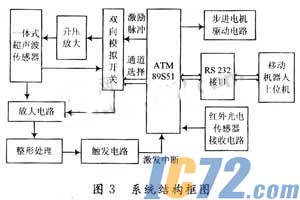
КµОпХХЖ¬ИзНј1ЛщКѕЈ¬і¬ЙщІЁґ«ёРЖчєёФЪPCB°еЙПЈ¬°еЧУНЁ№эёЦ№ЬКчЖрЈ¬ёЦ№ЬБнТ»¶ЛєНІЅЅшµз»ъЦбПаБ¬Ј¬ІЅЅшµз»ъ№М¶ЁФЪ»ъЖчИЛµЧЕМПВ·ЅЎЈґ«ёРЖчїШЦЖРЕєЕУлКдіцРЕєЕНЁ№эРЕєЕПЯєНіµЙнЙПµДїШЦЖ°еПаБ¬ЎЈБнНвФЪі¬ЙщІЁґ«ёРЖчµДМЅН·З°јУТ»ЕЭДІДБПЦЖіЙµДФІМЁРОМЧНІЈ¬ЙПїЪЦ±ѕ¶ОЄ22 mmЈ¬ПВїЪЦ±ѕ¶ОЄ16 mmЈ¬ёЯ20 mmЎЈХвСщ·ўЙдІЁµДІЁКшЅЗТФј°·ґЙдІЁ±»ЅУКХµДЅЗ¶И¶јґуґуКЬПЮЦЖЎЈОЄБЛ»ъЖчИЛЧФОТµчХыЧЛМ¬Ј¬РиТЄИ·¶ЁЖдЧФЙнµДЧЄ¶Ї·ЅПтєН»щЧјО»ЦГЎЈТт¶шЧФЦЖТ»Ж¬УЙЦ±ЙдКЅємНв№вµзґ«ёРЖчєНЧЄЕМЧйіЙµДјтТЧ№вµз±аВлЖчЎЈ2ёцЦ±ЙдКЅємНв№вµзґ«ёРЖч·ЦІјИзНј2ЦР2ёцIЈ¬ўтЛщКѕТФ180ЎгјдёфЛ®ЖЅ°ІЦГФЪ»ъЖчИЛРЎіµіµЙнБЅІа±ЯµДЦРµгБ¬ЅУПЯЙПЎЈЧЄЕМУлЧЄ±ЫБ¬ЅУФЪН¬РДФІЙПЈ¬ИзНјЦРНвФІЛщКѕЈ¬1Ј¬3їМПЯјдПаёф27ЎгЈ»2Ј¬1їМПЯПаёф180ЎгЈ¬ЖдЦР1їМПЯУлі¬ЙщІЁґ«ёРЖчµДЦРРД±ЈіЦФЪН¬Т»Л®ЖЅПЯЙПЎЈIµҐ¶АµјНЁЧчОЄ»щЧјЧш±кЈ¬IЈ¬ўтН¬К±µјНЁУГАґЕР¶ПРэЧЄ·ЅПтЈ¬ўтµҐНЁЧчОЄ»ъЖчИЛСШЗЅ»Ш№йК±µДµјєЅ»щЧјЎЈ
НЁ№эІЅЅшµз»ъґш¶ЇТ»МеКЅі¬ЙщІЁґ«ёРЖчЧЄ¶ЇЈ¬ТФґ«ёРЖчЦРЦбґ№Ц±УЪ»ъЖчИЛіµМеµД·ЅПтЧчОЄЖдЧФЙнЧЛМ¬µчХыµДЧш±к»щЧјЈ¬ІЅЅшµз»ъІЙУГ4Па4ЕДІЅѕаЅЗОЄ1.8ЎгЈ¬ГїЧЄ1ІЅЈ¬і¬ЙщІЁґ«ёРЖчјмІв1ґОЈ¬Ѕ«ІвБїЦµНЁ№эґ®їЪЛНЙПО»»ъЎЈ
2.2 МЅІвПµНіУІјюЙијЖ
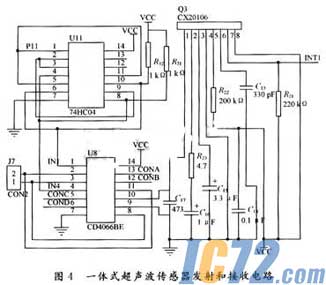
МЅІвПµНіУІјюЦчТЄУЙі¬ЙщІЁ·ўЙъµзВ·Ўўі¬ЙщІЁЅУКХµзВ·Ј¬ІЅЅшµз»ъµчЛЩДЈїйµИЧйіЙЎЈИзНј3ЛщКѕЈ¬ПµНіµДєЛРДОЄµҐЖ¬»ъ89S51Ј¬ЦчТЄНкіЙРЕєЕµД·ўЙдєНЅУКХЎўїШЦЖІЅЅшµз»ъЎўІўґ«ЛНКэѕЭёш»ъЖчИЛЙПО»»ъЅшРРґ¦АнЎЈ
і¬ЙщІЁµД·ўЙдµзВ·ІЙУГµҐЖ¬»ъATM89S51µДP11їЪКдіц·ўЙдВціеЈ¬УЙ74HC04ЧчОЄЗэ¶ЇАґБ¬ЅУі¬ЙщІЁґ«ёРЖчЈ¬74HC04КЗОЄБЛФцЗїЖдКдіцµзБчµДДЬБ¦Ј¬МбёЯі¬ЙщІЁґ«ёРЖчµД·ўЙдѕаАлЎЈ
і¬ЙщІЁЅУКХґ¦АнµзВ·ІЙУГјЇіЙµзВ·CX20106ЎЈCX20106ОЄємНвЅУКХЧЁУГјЇіЙµзВ·Ј¬ФЪґЛАыУГCX20106ЧчОЄі¬ЙщІЁґ«ёРЖчЅУКХРЕєЕµД·ЕґујмІЁЧ°ЦГЈ¬ТаИЎµГБјєГµДР§№ыЎЈCX20106ЦРЗ°ЦГ·ЕґуЖчЅУКХµЅі¬ЙщІЁЅУКХМЅН·µД·ґЙдРźź󣬶ФРЕєЕЅшРзŴ󣬵зС№ФцТжФј80 dBЎЈИ»єуЅ«РЕєЕЛНµЅПЮ·щ·ЕґуЖчЈ¬К№Жд±дОЄѕШРОВціеЈ¬ФЩУЙВЛІЁЖчЅшРРЖµВКСЎФсЈ¬ВЛіэёЙИЕРЕєЕЈ¬УЙјмІЁЖчВЛµфФШЖµјміцЦёБоРЕєЕЈ¬ФЩѕ№эХыРОєуЈ¬УЙ7ЅЕКдіцµНµзЖЅЎЈ7ЅЕКдіцµДВціеПВЅµСШНЁ№эµҐЖ¬»ъINT0їЪКдИлЎЈИзНј4ЛщКѕЎЈ
Т»МеКЅі¬ЙщІЁґ«ёРЖч·ўЙдµзВ·УлЅУКХµзВ·¶јУГПаН¬µДґ«ёРЖчТэЅЕКдИлЈЇКдіцЈ¬ИзІ»Ѕ«КдИлЈЇКдіцёфАлїЄЈ¬ЅУКХµзВ·Ул·ўЙдµзВ·»бПаѕЮУ°ПмЈ¬ІЙУГCMOSЛ«ПтДЈДвїЄ№ШCD4066BEКµПЦ·ўЙдУлЅУКХµДёфАлЎЈІЅЅшµз»ъїШЦЖДЈїйЈ¬ІЙУГ»·РОВціе·ЦЕдЖчL297+Л«HЗЕ№¦ВКјЇіЙµзВ·L298µДїШЦЖ·ЅКЅЎЈµҐЖ¬»ъµДP1.6Ј¬P1.7Ј¬P2.3·Ц±рЅУL297µДCWЈ¬clockЈ¬enableїШЦЖ¶ЛЈ¬їШЦЖµз»ъµДХэ·ґЧЄЎўК±ЦУРЕєЕЎўЖфНЈЎЈ
2.3 МЅІвПµНіИнјюЙијЖ
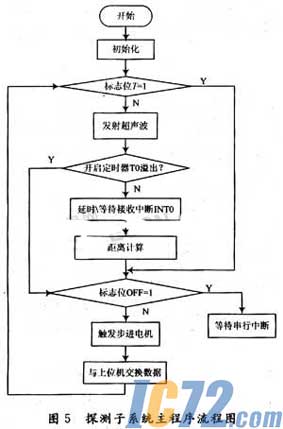
МЅІвПµНіµДИнјюЦчТЄУЙЦчіМРтДЈїйЎўЦР¶П·юОсіМРтДЈїйЎўґ«ёРЖч·ўЙдЅУКХДЈїйЧйіЙЎЈХвАпЦчТЄ¶ФМЅІвПµНіЦчіМРтДЈїйјУТФЛµГчЎЈЦчіМРтБчіМНјИзНј5ЛщКѕЎЈ
і¬ЙщІЁґ«ёРЖчєНІЅЅшµз»ъІвїШДЈїй·ЦКфІ»Н¬µДµҐЖ¬»ъїШЦЖЈ¬ТтґЛёРІвПµНіУлТЖ¶Ї»ъЖчИЛµДЙПО»»ъ±ШРлТАїїµҐЖ¬»ъјдµДIЈЇOїЪПЯј°ґ®РРТмІЅНЁС¶КµПЦЎЈ±кЦѕО»TКЗУГАґЗР»»¶ЇЧчЈ¬T=0Ј¬OFF=0Н¬К±ВъЧгК±Ј¬КЗі¬ЙщІЁґ«ёРЖчС°іЈµДМЅІв№эіМЈ»T=1Ј¬OFF=0К±КЗГїТ»ёцС»·ІвБїЗ°µчХы·ЅО»ЅЗУГЈ»OFF=1КЗµИґэПВТ»ґО¶ЇЧчЎЈјЖЛг»ШІЁµДК±јдІЙУГ¶ЁК±ЖчT0Ј¬ТтґЛѕаАлЦµd=0.334ЎБ(TH0ЎБ256+TL0)ЈЇ2ЎЈГїІвНк1ґОЈ¬ёшІЅЅшµз»ъ1ёцґҐ·ўВціеЎЈИ»єуЕР¶ППВТ»ёц¶ЇЧчЈ¬КЗЧцґ«ёРЖчМЅІв»№КЗ»ъЖчИЛЧФЙн·ЅО»ЅЗµчХыЈ¬ХвСщУЦЅшИлТ»ёцРВµДС»·ЎЈ
3 МЅІвПµНіФЪТЖ¶Ї»ъЖчИЛЙПµДКµСйУлУ¦УГ
3.1 С°ХТАлЗЅЧоЅьµг
±ѕОДФЪС°ХТАлЗЅЧоЅьµгµДЙијЖЛјПлЧг»щУЪі¬ЙщІЁІвѕаЎЈСЎФсК±јд¶ИФЅКЅµДІвѕа·Ѕ·ЁЈ¬НЁ№э¶ФЅУКХ»ШІЁгРЦµµДЙи¶ЁєНМЅН·З°јУТ»ѕЯУРОьТфЧчУГµДМЧНІЈ¬АґПЮЦЖі¬ЙщІЁґ«ёРЖчЅУКХ·¶О§ЎЈКµСйЛщІвФЪѕаАл75 cmК±Жд·ўЙдІЁКшЅЗФЪЎА20ЎгЧуУТЈ¬ДЬЅУКХ·ґЙдІЁµДУРР§ЅЗ¶ИґуФјФЪЎА40Ўг·¶О§ДЪЎЈ
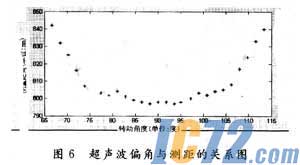
і¬ЙщІЁґ«ёРЖчµДЅьЛЖФІЧ¶РОµДІЁКшЈ¬ѕц¶ЁБЛЖдГїТ»ґОЛщІвѕаАлКЗЧоЅьµгµД·ґЙдѕаАлЎЈИзНј3ЛщКѕЈ¬µ±ІЁКшЅЗ¶ИјґК№Ж«АлµЅРйПЯЛщКѕЈ¬ЖдКµјКЛщµГѕаАлИФѕЙКЗСШІЁКшЦРРДПЯЛщІвµДЦµЎЈ°ґАнВЫЙПЛµФЪ·ўЙдІЁКшЅЗ¶ИДЪЛщІвµДѕаАлУ¦ёГКЗПаН¬µДЈ¬µ«УЙУЪі¬ЙщІЁґ«ёРЖчЖрХрК±јдЎўТФј°ЅУКХгРЦµµДЙиЦГЈ¬°ьАЁЗЅГжµД·ґЙдЗйїцµИ¶ј»б¶ФѕаАлµДІвБїФміЙТ»¶ЁµДУ°ПмЎЈУЙКµСйІвµГЈ¬µ±ФЪТ»¶ЁµДЅЗ¶И(ФјЎА20Ўг)ДЪЈ¬ЖдІвБїµДѕаАлЦµ±д»ЇІ»ГчПФЈ¬ЖдПаБЪЦµ±ИЅПЅУЅь(І»і¬№э2 mm)ЎЈµ±Ж«ЅЗјМРшФцґуК±Ј¬ПаБЪІвБїЦµ±д»ЇТІГчПФФцґуЎЈТт¶шТ»ЦЦ·Ѕ·ЁѕНКЗАыУГХв2ёцБЩЅзµгЈ¬АґХТС°ЖдІЁКшУлЗЅґ№Ц±µДЅЗ¶И(јґУлЗЅѕаАлЧоЅьµг)Ј¬ІЅЅшµз»ъґш¶Їі¬ЙщІЁРэЧЄХТС°Хв2ёцБЩЅзµгЎЈµ±Б¬РшјмІвµЅБЅПаБЪµДЦµµНУЪ2 mmК±Ј¬ИПОЄТСЅшИлОИ¶ЁЗшЈ¬ФтЗ°єуіцПЦ±д»ЇµДµгЙиОЄБЩЅзµгЈ¬ФЪХвБЩЅзµгДЪµДЛщУРµг¶јјЗПВАґЈ¬И»єуЗуИЎЦРµгЈ¬ЦРµгО»ЦГјґКЗЗЅГжУлі¬ЙщІЁґ«ёРЖчµДЧоЅьµгЎЈИзНј6ЛщКѕОЄЖдЦРТ»ЧйЛщІвКэѕЭЈ¬ФЪ72ЎгЎ«108ЎгДЪЈ¬КЗѕаАлІвБїµДОИ¶ЁЗшУтЈ¬¶шФЪХвЦ®НвЈ¬ЛщІвѕаАлµДПаБЪЖ«Іоі¬№э8 mmЈ¬¶шЗТЛжЧЕЅЗ¶ИµДРэПтБЅ±ЯК±Ѕ«ЅшТ»ІЅАґуЎЈФЪ50 cmУл200 cmДЪёД±дТ»МеКЅі¬ЙщІЁґ«ёРЖчУлЗЅГжѕаАлЅшРРКµСйЈ¬ЖдЅб№ыУлЗЅГжґ№Ц±ЅЗ¶ИЛщІвОуІоПЮЦЖФЪ2ёцІЅѕаЅЗДЪЎЈ
3.2 МЅІвПµНіУ¦УГУЪ»ъЖчИЛСШЗЅµјєЅ
ЧФЦчКЅТЖ¶Ї»ъЖчИЛКЗФЪФЛ¶Ї№эіМЦРМЅІвµ±З°»·ѕіµДРЕПўЎЈГїґОМЅІвµДѕаАлРЕПў¶јТФµ±З°»ъЖчИЛµДФЛ¶ЇЧЛМ¬ОЄЗ°МбАґІвБїЎЈ¶шФЪСШЗЅЦ±ПЯРРЧЯ№эіМЦРЈ¬»ъЖчИЛКЗНЁ№эІвѕаєНЧФЙнЧЛМ¬µД№ІН¬ёРЦЄ±ЈЦ¤ФЛРР№мјЈµДЧјИ·РФЎЈі¬ЙщІЁІвѕаТС±»№г·єФЛУГЈ¬ФЪКФСйі¬ЙщІЁМЅІвЅЗ¶ИУлІвѕаµД№ШПµєуЈ¬ФтїЙТФёщѕЭјЖЛгЧоЅьµгµД·Ѕ·ЁУГі¬ЙщІЁґ«ёРЖчАґІвБїіµЙнµД·ЅО»ЅЗ(И·¶ЁЧФЙнЧЛМ¬)ЎЈЛщІвЧоЅьµгКЗ»ъЖчИЛКµјКУлЗЅГжµДѕаАлЈ¬НЁ№эјтТЧ±аВлЖчЙПµДЦ±ЙдємНвґ«ёРЖч1АґИ·¶Ё»ъЖчИЛµД»щЧјЧш±кЈ¬ёщѕЭІЅЅшµз»ъГїТ»ІЅЧЯ№эК±ґжґўµДРЕПўАґјЖЛгЧоЅьµгЎЈФЪ»щЧјЧш±кєНЧоЅьµгјдЈ¬УГІЅЅшµз»ъЛщЧЯ№эµДЅЗ¶ИИ·¶Ё»ъЖчИЛУлЗЅГжµДЖ«ЅЗЈ¬И»єуЖ«ЅЗґ«ґпёшіµВЦЗэ¶ЇїШЦЖПµНіТФµчХы·ЅО»ЅЗЎЈ
3.3 ЛСС°ХП°Оп
ІЙУГІЅЅшµз»ъґш¶Їі¬ЙщІЁґ«ёРЖчРэЧЄµД·ЅКЅФЪ№¦ДЬЙПЅьЛЖУЪ¶аґ«ёРЖчјмІвЎЈТЖ¶Ї»ъЖчИЛНЁіЈІЙУГЦЬЙнО§ИЖ№М¶Ё¶аёці¬ЙщІЁґ«ёРЖчАґ»сИЎёь¶аµДРЕПўЈ¬ґУ¶шФцјУЛСЛчХП°ОпµД·¶О§Ј¬И·¶ЁДї±к·ЅПтєН±ЯЅзРЕПўЎЈУлЦ®Па±ИЈ¬ІЙУГРэЧЄµД·ЅКЅµДТ»ёцУЕµгЈ¬ѕНКЗїЙТФёщѕЭХП°ОпµДЅфГЬіМ¶ИЧФ¶ЇµчХыјмІвµДГЬ¶ИЎЈІЙУГФцјУґ«ёРЖчµДКэБїКЗКЬЧФЙнМхјюПЮЦЖµДЈ¬¶шРэЧЄ·ЅКЅµДЅфГЬЦ»єНІЅЅшµз»ъµДІЅѕаЅЗПа№ШЎЈјмІвГЬ¶ИµДФцјУїЙТФґуґуМбёЯ¶ФЅЗ¶ИµД·Ц±жБ¦Ј¬ґУ¶шјУЗї¶ФДї±к·ЅПтєН±ЯЅзРЕПўµДИ·¶ЁЎЈ
4 Ѕб Уп
±ѕПµНіКЗ¶Фі¬ЙщІЁґ«ёРЖч№¦ДЬЙПµДТ»ґОСУЙмЈ¬КЗ¶ФТЖ¶Ї»ъЖчИЛµДПЦУРМЅІвПµНіµДТ»ёцєЬєГµДІ№ідЎЈЖдФЪКµСйУ¦УГЦеõЅід·ЦµДХ№КѕЈ¬ЛыФЪХП°ОпМЅІвєН»ъЖчИЛО»ЧЛµДµчХыЙПѕЯУРТ»¶ЁµДКµУГРФЎЈµ«ёГ·Ѕ·ЁФЪКµК±РФЎўѕ«И·РФЙПУРґэЅшТ»ІЅМбёЯЎЈ
|