1 ��乲���洢����Ӳ���ӿڵ�·��������������
1.1 �źŴ�����Ӳ���ӿڵ�·
����DSP���źŴ�������Ը���Ӧ��Ҫ�����������źŴ����㷨�����ź�Ԥ������Ŀ��ʶ������ٶ�λ��Kalman�˲��ȡ���������ԭʼ�ź�����ͨ�����ͨ�Ŵ����ݲɼ����á�������ð�乲���洢���ķ�����������ݽ�����DSP�ȿ��Դӹ����洢����ȡ�ɼ����ݣ�Ҳ���Ѵ������(���µij̿طŴ���ֵ�����ٶ�λ�����)д�������洢���й�MCU��ȡ��
TMS320C32��һ��˫���пڣ���������ÿ֡ͬʱ�շ�8/16/24/32λ���ݣ�ͬ��ʱ�ӿ������ڲ����ڶ�ʱ�����������ⲿ���롣ͨ�����ô���ȫ�ֿ��ƼĴ��������ƴ��ڵ����幦�ܺ���ģʽ��ͨ������FSX/DX/CLKX�˿ڿ��ƼĴ�����FSR/DR/CLKR�˿ڿ��ƼĴ��������ƴ���6�����ŵĹ��ܣ�������������ÿ������Ϊͨ�õ�I/O���Ż�ͨ�����š�TMS320C32������ͨ�õ�I/O����ΪXF0��XF1�����ڹ����洢���ӿڵ�·��Ҫ4��������������DSP��MCU�������ͨ�ţ�����Ѵ��ڵ�2������FSR0��FSX0����Ϊͨ�õ�I/O�������������ߡ��ӿڵ�·ԭ��ͼ��ͼ1��ʾ��
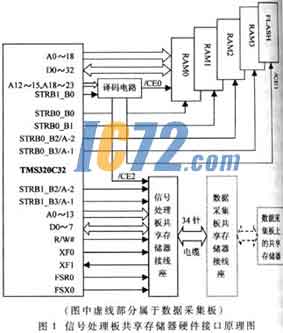
ͼ��RAM0��RAM3����Ƭ����Ϊ512K��8λ����RAM(оƬ�ͺ�ΪCY7C1049��17VC)�����32λ���ݿ��ȵĴ洢����DSP����ʱ�ij�������ݶ�������ƬRAM�С�FLASH(оƬ�ͺ�ΪAm29F016)���ڴ洢����ͳ�ʼ�����ݣ���ʹ��������Ҳ����ʧ��DSP�ϵ�ʱ���Դ���BOOT LOADER�����FLASH��ȡ��������ƬRAM�����С��ӹ����洢����ȡ�IJɼ�����Ҳ�ݴ浽����ƬRAM�С�
1.2 ���ݲɼ���Ӳ���ӿڵ�·
���ڵ�Ƭ��AT89C51�����ݲɼ����ڵ�Ƭ����ȫ�ֿ����£�ͨ���Զ�·����������������źŽ��г̿طŴ�ͨ�˲���ͬ���������֡�A/D�任��ʵʱͬ���ɼ���·�źţ����Ѳɼ������ź����ݴ�������ݲɼ����ϵ�128K�����洢��(оƬ�ͺ�ΪCY7C109��12VC)�С�
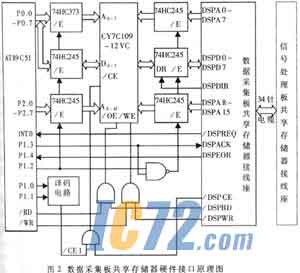
�����洢���������߸����·��������ݲɼ����ϡ���ijһʱ�̣������洢��ֻ�ܱ�ijһ�����ʣ������������߳�ͻ��������MCU�л�ѡͨDSP����Ƭ�����ߣ���ʱ���ʹ����洢�������߸���оƬѡ�ó�����˫�����߸���/����оƬ74HC245������һ�����ʹ������(E)��һ�����ݴ��䷽��(DIR)���ţ�MCUͨ������������������������߸��������ݴ��䷽����ƹ��ܡ��ӿڵ�·ԭ��ͼ��ͼ2��ʾ��ͼ�У�MCU�˵����߸�����һƬ74HC373����Ƭ74HC245��ɣ�DSP������Ƭ74HC245����������ߺ͵�ַ���ߵĸ��롣��P1.2����ѡͨ�������ߣ���P1.2Ϊ�͵�ƽʱ�������洢��ֻ�ܱ�MCU���ʣ���P1.2Ϊ�ߵ�ƽʱ��ֻ�е�P1.3ҲΪ�ߵ�ƽʱ(��ʾMCUͬ���ó������洢��)�������洢�����ܱ�DSP���ʡ�����DSP��Ҫ����д�����洢����������Ҫ���������������߸���оƬ74HC245�����ݴ��䷽������ͨ������DSPDIR�ź��ߵĵ�ƽ״̬�����(�ߵ�ƽʱΪ�����͵�ƽʱΪд)�����ڵ�ַ���ߵ����ݴ��䷽��ʼ���ǵ���ģ����������оƬ��DIR�˿��Թ̶��ӵ͵�ƽ��ߵ�ƽ����74HC245��ʵ�ʽ��߶�����
1.3 ������������
�źŴ������ϵ�DSP��Ҫ�ɼ��ź�����ʱ�������ݲɼ����ϵ�MCU���������źţ���Ƭ�����յ������źź����ͬ���ó������洢��������DSP����Ӧ���źţ�ͬʱ����MCU�˵����ߣ���ͣ���ݲɼ���DSP���յ�Ӧ���źź�Ϳ��Է��ʹ����洢����DSP���ٶ���д�����ݺ���Ƭ���������źţ���Ƭ�����յ������źź��ջع����洢����ͬʱ����DSP�����ߣ������ɼ����������ݲɼ����źŴ����Ϳ���ͬʱ���У���ͬ��һ��IJɼ�һ�δ���һ�εĴ��й���ģʽ��ʵ�������ݲɼ���ȴ���������ϵͳ�������������μ�ͼ3�Ľ���ͼ��һ��������ͨ�Ź����������£�ע����DSP�����ʼ��ʱӦ��XF0��XF1��FSR0����Ϊ��Ӧ����Ч״̬��

1��DSP��Ҫ�ɼ��ź�����ʱ��MCU�������ź�(��XF0Ϊ�͵�ƽ)������MCU��INT0�жϣ��ȴ�MCUӦ��(DSPѭ�����XF1��״̬)��
2�����MCUͬ���ó������洢��������Ӧ�жϣ�����ȴ������жϷ�������У���P1.3(��DSPACK)Ϊ�ߵ�ƽ����ʾӦ��ͬʱ��P1.2Ϊ�ߵ�ƽ��ѡͨDSP���ߡ�MCU����ѭ�����P1.4����DSPEOR)��״̬��
3��DSP�յ�Ӧ���ź�(����XF1Ϊ�ߵ�ƽ)���������ٶ�д�����洢�����ڶ�����ǰ����FSX0Ϊ�ߵ�ƽ����д����ǰ����FSX0Ϊ�͵�ƽ����д�����MCU�������ź�(��FSR0Ϊ�ߵ�ƽ)��DSP�����Ž�����������������
4��MCU�յ������źź�(����P1.4Ϊ�ߵ�ƽ)����P1.2Ϊ�ߵ�ƽ������DSP���ߣ��ջع����洢���������ɼ���
2 �źŴ����������>ϵͳ��ͨ��
�źŴ���������ݲɼ����ȡ�ɼ����ݺ����������һϵ���źŴ����㷨�����㴦�����õ��Ĵ��������Ҫ�������ڵ�Ƭ�������Ŀ���ϵͳ����������Ĵ��������������С���������ô���ͨ�ŵķ����������ݴ�����Ϊ�����ǿ���ֱ�Ӷ��źŴ�������DSP�Ĵ��ڱ���������ϵͳ����ͨ�š�������DSP�Ĵ���Ϊͬ�����ڣ�����Ƭ�������Ĵ���ͨ����Ϊ�첽���ڣ���������Ҫ��������ģ��DSP���ڵ��첽ͨ��ʱ�����������������ͨ�Ų��ɿ�������ͨ����չ��Ƭ���빲���洢���ķ����ܺõؽ����������⡣DSP�Ѵ������д�������洢���У�����������һ�ִ������ɵ�Ƭ���ӹ����洢����ȡ�������������������ϵͳ�����ʡȥ��DSP���д���ͨ�������ʱ�䣬����ȵ�������DSP�ĸ������ݴ�������������ʵʱ��Ҫ��ܸߵij��ϣ����Ե���Ϊ��Ҫ��ͨ����չ������Ӳ�������������ϵͳ���ٶȣ��Ż����������ܣ���������ʵ��Ҳ�������ࡣ
2.1 �źŴ����������ϵͳ�Ĵ���ͨ��Ӳ����·
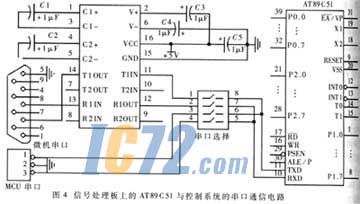
�źŴ�����������չ�ĵ�Ƭ��AT89C51���������MCU�Ŀ���ϵͳ����ȫ˫��ͨ�š�ͼ4ΪAT89C51�Ĵ���ͨ�ŵ�·��ͨ��"����ѡ��"���뿪��ѡ������������Ŀ���ϵͳͨ�ţ����������MCU�Ŀ���ϵͳͨ�š�
��IBM PC/XT��ϵͳ�У��䴮�ڷ���RS��232C�ӿڱ���Ϊ��߿�����������RS��232C�����ø������͵�ƽ��-5�֡�-15V֮��(ͨ����-12V��ʾ)Ϊ��"1"���ߵ�ƽ�ڣ�5V����15V֮��(ͨ���ã�12V��ʾ)Ϊ��"0"��������ƽ��ΪEIA��ƽ������TTL��ƽ��CMOS��ƽ��ͬ��Ϊ��ʹAT89C51���������д���ͨ�ţ��������ó�����MC1488��MC1489���е�ƽת����MC1488��TTL��ƽת��ΪRS��232C��ƽ��MC1489��RS��232C��ƽת��ΪTTL��ƽ��������MC1488��MC1489��Ҫ��12V�Ĺ����ѹ�������˵�Դ��·�ĸ����ԣ���ͼ4��ʾ������ѡ��ֻ�赥һ��5V��ѹ��MAX232����ɵ�ƽת��������Ӳ����·��
���źŴ����������MCU�Ŀ���ϵͳͨ��ʱ��ֻ�������ߣ�һ��������(TXD)��һ��������(RXD)��һ��������(GND)����˫���ĵ�������һ�𣬽�˫���ķ�����������߽������Ӽ��ɡ����źŴ�������������Ŀ���ϵͳͨ��ʱ���������ľ��봮�ڽ���ͨ�ţ����ǵĴ��ڵ���������ͼ5��ʾ������ķ������������û�н��棬����Ϊ�ڽ��е�ƽת��ʱ�Ѿ��������(�μ�ͼ4)��
2.2 �źŴ����������ϵͳ�Ĵ���ͨ���������
��Ƭ���뵥Ƭ���������д���ͨ�ŵ�������������֣���ѯ��ʽ���жϷ�ʽ������ͷ�(�źŴ�����)���ò�ѯ��ʽ�����շ�(����ϵͳ)�����жϷ�ʽ��ͨ�ų�����Ҫ��ɶԴ��ڳ�ʼ��(����ѡ��ģʽ���������ݴ����ʽ�����ò����ʵ�)���������ӡ��������ݺͶϿ����ӵȹ��ܡ�Ϊȷ��ͨ�ſɿ���˫��Լ������ͨ��Э�顣

1���źŴ������ϵ��һֱ�������������ź� iR i���ȴ�����ϵͳ��Ӧ���ź� iA i������źŴ������յ�Ӧ�𣬱�ʾ˫��Ӳ��������ȷ�������ɹ���
��
2�����п���ϵͳ�Ĵ���ͨ�ų������������ͨ�ţ������Զ�������ӵ����ĸ�����(COM1��COM2)���������źŴ����巢Ӧ���ź� iA i����û������ʾ������Ϣ����ʾ�������Ƿ����������뵥Ƭ��ͨ�ţ�����ڹ涨��ʱ����(��10s��)��û���յ�Ӧ������ָʾ����˸����Ϊ�����������¸�λ��
3���źŴ������յ�Ӧ����������ϵͳ�����ܹ�Ҫ��������ݸ�����Ȼ�����η���ÿ�����ݣ�ֱ������Ϊֹ��
4������ϵͳ��������Ӧ���źźʹ��ڽ���״̬���Ƚ����ܹ������ݸ�����Ȼ�����ν���ÿ�����ݡ�����ϵͳÿ���յ�һ�����ݶ����źŴ����巢ȷ���źţ��źŴ�����ֻ���յ�ȷ���źź�ŷ���һ�����ݡ�
���⣬�ڵ�Ƭ������֮�����ͨ��ʱ��˫��Ҫ��ȷѡ��һ�µIJ����ʢ�����SMODλ��ѡ��Ӱ�쵥Ƭ�������ʵ�ȷ�ȣ���Ӱ�첨���ʵ���Χ������ڵ�Ƭ������������ʱ����SMOD��ѡȡҲҪ�ʵ����ǡ�Ϊ�˱�֤ͨ�ŵĿɿ��ԣ�ͨ�������������Ҫ����2.5��������Ƭ������֮�����ͨ��ʱ������Ҫע����һ�㡣���磬��Ƭ����ʱ��fOSC��12MHz������ģʽΪ��ʽ1�����赥Ƭ�������IJ����ʶ�ѡΪ9600bps����SMOD��0ʱ��������������Ϊ8.5������SMOD��1ʱ��������������Ϊ6.99����ʵ�����������SMOD��0��1����Ƭ�����������������¾�����ʵ�������ķ�������ա���˫���IJ����ʶ�ȡ4800bps����SMOD��1ʱ��������������Ϊ0.16����ʵ��֤��ͨ����ȫ�ɿ���
|