1 逆变器控制系统的组成与工作
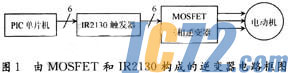
由芯片IR2130触发器构成的逆变器广泛应用于电力驱动系统中,例如用于电动自行车、电动摩托车、混合动力汽车上。这些车辆大多采用无刷直流电动机驱动,通过改变IR2130[1]输出的触发脉冲脉宽实现恒转矩调压调速。整个逆变器系统的电路框图如图1所示。下面介绍系统的工作原理。
由PIC单片机输出的高频(取5000 Hz)脉冲是脉宽可调的等幅PWM脉冲,将其与代表转速高低的低频换相脉冲相"与"后加到IR2130的3个上侧输入端。由单片机PIC输出的另外3个低频换相脉冲加到IR2130的下侧输入端。这6个脉冲经IR2130的一系列处理后从IR2130的6个输出端轮流送到主回路MOSFET(或IGBT)栅极上,使不同桥臂上的两个MOSFET导通,导通次序是:
正转:16→12→32→34→54→56
反转:56→54→34→32→12→16
其中数字代表MOSFET号码。是正转还是反转由单片机的逻辑决定。
作为开关器件,MOSFET工作在饱和与截止2个状态。饱和导通时管内漏源极间电压降不过2 V左右。PWM的频率取为5000 Hz,则6个MOSFET每秒内饱和导通5000次,截止5000次。设电动机的转速为7,n/s,电机极对数为p时,每个电角周期内PWM脉冲个数为5000/pn,z,每个MOSFET在120°电角内得到的PWM数为5000/(3 × pn)=1667/pn,假定电动机极对数p=2[2,3]。
显然,转速越高,120°电角内的PWM个数越少。以电动自行车为例,设其最高、最低车速分别为36 km/h和6km/h,则因n=5转/s和5/6转/s(假设车轮周长为2m),故在120°电角内每个MOSFET受到的PWM个数便分别是167个和167×6△1000个。这表明,电动机转速的高低只影响每个MOSFET在120°电角内分配到的PWM个数的多少,但不影响电动机每秒内脉冲个数的多少,因为电动机受到的是恒频5000 Hz的脉冲之故。
PWM的频率虽是固定的,但每个PWM脉宽是可调的。由于MOSFET是高频器件,其最高频率可达千kHz,所以在5000 Hz频率内实现脉宽调制不会有任何困难[4]。
上面已指出,MOSFET是在开关状态下工作。当电源电压为36 V时,每个MOSFET饱和导通时管压降约为2V左右,则由逆变器输出去的斩波幅值为36-2×2=32V。上桥臂导通管的源极电位Us将达36-2=34V左右(以电源负端为参考点),而栅极电位必须比源极电位高10~12V才能深度饱和导通,这样,栅极电位将达到34+10=44V。但当同一桥臂上的下侧MOSFET导通时,他又要从44V变为2V。可见每个桥臂上的电压输出端Vs1,Vs3,Vs5均在不停地变动之中。由于44V的电位远高于IR2130的电源电压(±15 V),所以必须使上桥臂的IR2130的三个输出端以及环节LT和UVD1处于悬浮状态,让他们的电位随Vs1,Vs3,Vs5一起变动。用电容自举电路可以方便地实现这一点。
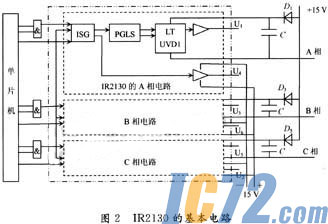
自举电路的构成如下:把上桥臂上3个触发电路的电源负端分别与Vs1,Vs3,Vs5相连,电源正端则通过3个隔离二极管共同接到+15V电源Vcc。由于二极管的隔离作用,3个上桥臂的触发电路之间互不通电,同时在每一个正负电源间并联上一个自举电容C(0.1μF),如图2所示。由于Ub,Us均处于浮动状态,他们之间电位差将在15V附近波动,自举电容将随MOSFET的通断而不停地充放电。当MOSFET管M1导通时,Us1,升为34V,他把Ub1抬举到34+10=44V的高电位,此时二极管D1因承受反向电压而截止,这就把Ub3,Ub5与Ub1隔离开来,使Ub1,Us1的悬浮不影响到其他2路上桥臂触发电路。120°电角后,轮到Ub3,Us3悬浮,情况也是如此,以此类推。悬浮保证了MOSFET栅极电位能可靠地比其源极高。10V,即保证了上桥臂3个触发电路的可靠导通。3个下桥臂的触发电路4,2,6由于无需悬浮而简单不少,只需加上固定的15V电源就行了。每一瞬间,不同上、下桥臂各有一个MOS-FET导通,一个周期(360°电角)内6个MOSFET轮流一遍。每个MOSFET工作120°电角,每隔60°电角轮换一个MOSFET。对逆变器来说,电流总是从上桥臂的MOS-FET流出,是方向不变的直流;但对电动机来说,随着M1,M3,M5的轮流导通,流过电动机定子线圈的电流却是交流的,每一瞬间都有两相轮流导通,形成会旋转的磁场,在转子位置检测器的帮助下拉着永磁转子旋转。
2 IR2130内部各环节的工作情况
触发器IR2130包括基本触发电路和安全保护电路2部分。其基本电路已如图2所示,上桥臂包括 4个环节:输入信号处理器ISG、脉冲发生器和电平移位器PGLS、锁存器LT和欠电压检测器UVD1,末级驱动器DR。下桥臂信号从ISG出来后直接送到DR,没有中间两个环节。
输入信号处理器ISG实质上是一个安检门电路,仅当故障逻辑输出1态(无故障)时才允许单片机输出的触发脉冲信号通过ISG进入下一环节PGLS。为防止同一桥臂上、下器件间发生直接短路,每个信号处理器ISG输出的上、下信号之间至少有2μs的死区。
脉冲发生器和电平移位器PGLS的作用是将ISG送来的脉冲信号送入脉冲发生器后,发生器随即根据输人信号的上升沿和下降沿发生超短"开"、"关"脉冲,用来驱动高速电平转换器,后者则对处于悬浮状态的RS触发器进行位置复位操作。由于操作时间极短,不会影响悬浮效果。
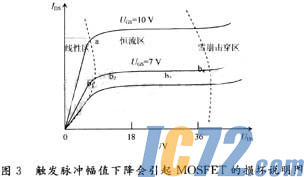
锁存器LT和欠电压检测器UVD1的作用是把上一级PGLS送来的PWM脉冲先送到锁存器LT中暂驻一下,使其与欠电压检测器UVD1中的允许值进行比较,不低于后者时才能送入末级驱动器去触发MOSFET。那么,为什么要对触发脉冲幅值加以限制呢。原因是,如果触发脉冲幅值达不到设定值,比如由于某种故障使触发脉冲幅值减少了30%,由原来的UGs=10V降到7V,MOS-FET的工作点由a点突降到UGs=7V的b1点,但不能稳定在此工作点,因为UGs降为7V后,电流IDs也下降很多,使电磁转矩M=CmIDsφ也随之下降,出现MU=UDs+E+IDs(Ri+Ra)
可知,在外加电压U=36V不变时,由于IDs及E均下降,故MOSFET的管压降UDs必不断上升,经b2,b2,b4等点最后进入雪崩击穿区,导致MOSFET损坏(见图3)。可见UGs一旦确定后(10~12V)就不再允许随便降低,这就是要不停地检测UGs是否欠电压的原因。当然,如果仅是个别触发脉冲偶尔降低一下,然后又恢复原值,就不会发生上述情况。
除触发脉冲欠电压必须防止外,一种更为严重的事故是直通短路。当单片机输出的触发信号发生逻辑错乱,致使同一桥臂上、下两个触发信号均为正时,如不采取保护措施,就会造成直通短路事故。为此,IR2130内部的输入信号处理器ISG设有专门逻辑,在上述错乱情况下封锁ISG的两个输出,从而保护了MOSFET免受损害。
3 IR2130中的安全保护电路
IR2130内部设有4种保护电路,除上述的触发脉冲欠电压保护外,还有下列3种保护电路,见图4。
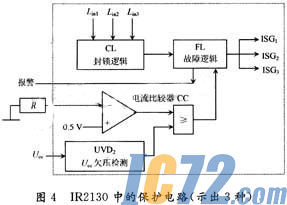
(1)单片机输出的三相换相触发信号是否对称。不对称情况包括缺相,或三相换相脉冲彼此相位差不是120°,或者三相脉冲幅值不等。出现这些情况时,由Lin1,Lin2,Lin3引入到封锁逻辑CL后,CL会输出封锁信号给故障逻辑FL,使后者封锁3个输入信号处理器ISG,保证系统不受损害。
(2)外电路的过电流保护。包括电动机堵转或由于负载过重引起的过电流以及负载侧的短路事故等。为了防止过电流,IR2130内部设有电流比较器CC,由电阻R(见图4)引出的电流信号送人电流比较器CC的负端,当电流信号形成的电压超过0.5V时,比较器CC反转,使故障逻辑FL输出封锁信号,从而起到保护作用。图4中取R=0.04Ω是假定最大允许电流不超过12.5 A;如果允许电流值不同,R应取不同值。也可取消采样电阻R,改用由霍尔元件及运放构成的零磁通电流传感器来检测电流。
(3)IR2130的供电电源Ucc欠压保护。如果电源电压Ucc达不到15V,将可能使IR213O输出的触发脉冲幅值达不到10 V,其后果与前述触发脉冲欠电压效果相同,因而是不允许的。为此,IR2130内部设有Ucc欠压检测器UVD2,其输出送入故障逻辑处理器FL,Ucc欠压时FL输出封锁脉冲。FL另有一个输出端,对上述3种故障可进行声光报警等。
4 结 语
根据上面的分析介绍,可以看出IR2130芯片是一款安全可靠、功能完备的集成触发器,可用来触发电流达数百安、电压达数百伏的高频电力电子器件,如MOSFET和IGBT等,并已获得广泛应用。本文给出的线路和具体数据可供电气驱动工程设计者参考,可用在电动摩托车以及简易混合动力汽车上。
|