1 问题提出
原航空航天工业部国营三○三九厂生产的UHM-B型工业锅炉水位显示控制报警装置,在一般工业锅炉上使用的较为广泛,该装置结构简单,动作灵敏,可靠。但该装置自设计出以来(从1992年)一直未做太大的改动,技术实现上已经很落后。而根据市场需要,用户要求技术含量更高,具有一定的智能,特别是要能与计算机接口的数字化产品。原产品已不能适应,应原厂现航空工业总公司汉中天利航空机电有限公司的要求,对原系统进行改造,甚至重新设计,使其数字化。故而必须对原装置的测量部分进行彻底改造,满足数字化要求。
2 锅炉水位的测量
锅炉水位的测量使用浮子式液位传感器来测量的,该浮子是一种特制的不锈钢圆筒,圆筒内附有磁铁,故而该浮子也叫磁钢浮子。像原来用浮子测量液位一样,是通过水位计与锅筒汽水连管结合处的专用连接三通,将锅炉内汽水引至传感器外套筒内,使磁钢浮子在套筒内与锅炉水位同步升降,浮子的磁场力作用在套筒外的磁控开关阵上,当液位高时,浮子上移,与浮子磁铁对应处的干簧管吸合,其他的干簧管则处于断开状态。如图1所示。
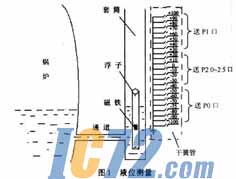
由于液位高低不同,致使浮子在套筒内的高低位置亦不同,与此对应的干簧管的动作亦不同,故而用干簧管的状态就可以表征出液位的高低位置。当按如图2的电路进行设计连接时,浮子位置不同,从单片机P0,P1,P2口读到的数据必然不同,且浮子位置与单片机I/O口读到的数据有着严格的关系,该关系描述了液位的高低状态。
3 软件流程
由硬件可知,当液位不同时,从P0,P1,P2口读取液位的测量数据不同,对此数据的处理由软件来解决。软件要解决以下几个问题:
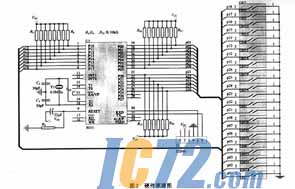
(1)对图2所示的硬件连接须进行数据编码。由于从P0,P1,P2读取的数据可能相同,但表示的液位却不同,故而对每一个液位都要进行相应的编码,由该编码表征液位的高低。
(2)数据的通讯。
(3)当磁钢浮子位置不正确时要给出相应的信号,即传感器处于非正常的位置时亦给出相应的编码。详细流程如图3所示。

累加器A中的编码01H,02H,03H,…,20H,21H,22H分别对应着锅炉液位+100,+90,+80,+70,…,+10,0,-10,…,-70,-75,-80,-90,-100处的位置,将累加器A中的编码值通过串口发送出去便可实现液位的通讯。在+100处与在-100处的A中的值分别附加了一个高、低位标志,当液位出现异常时,给累加器A中送编码00H,由于有标志故给累加器A中送00H可分为以下3种情形:
(1)当A=00H时,且无高、低标志,此错误码表示开机时传感器工作状态不正常。
(2)当A=00H时,且有高位标志,表示液位高于+100,即液位太高。
(3)当A=00H时,且有低位标志,表示液位低于-100,即液位太低。
一旦系统出现传感器故障,以上处理方法为现场维护人员提供了判定依据,便于迅速查出问题所在。
4 结语
经现场运行表明,该数字化的传感器性能稳定、测量准确,大大简化现场安装,具有较高的性能价格比,有较大的工程应用价值。 |