ժҪ�����п�Ժ�Ϸ������������˴�����ʵ���ҵĶ�ά��������������TI��˾���Ƴ���MSC1210��Ƭ�����ϣ���ʵ�ֻ����˶�Сλ�Ƶĸ߷ֱ��ʼ�⡣�������ȼ�Ҫ����λ�ƴ������ṹ�ص㣬Ȼ����ʵ��ʹ�������Ϊ��ϸ��˵��MSC1210�Ķ�·���븴������PGA���˲����������ԣ��ڴ˻����Ϲ���λ�Ƽ���Ӳ��ƽ̨��ͬʱ��Ϊ����ϵͳ��������˻������ӿڣ������û�����ʵ����Ҫ����ѡ����������ʡ��˲����ͺŵ���ز���������ﵽ�����Ӧ��Ч����
�ؼ��ʣ���ά�������� MSC1210 λ�Ƽ��
�� ��
������������Ӧ������õ���Ӧ�ã��ر����������Ķ�λϵͳ�У�Ҫ�����ܼ���С������λ�Ƶ���Ϣ[1]��Ŀǰ����λ�Ƽ���ԭ���϶࣬���ѧʽ���ź͵��ʽ������ʽ��ѹ��ʽ��[2,3]������Щ�������ڻ����˶�С�Ķ�ά����λ����Ϣ�Ļ�ȡ��Ϊ�˽���������Ķ�ά����������������λ����Ϣ��ȡ���п�Ժ�Ϸ������������˴�����ʵ�����ڸ����ά���������ṹ������ͬʱ��������õ���������TI����MSC1210��Ƭ�������������ԣ������Դ���8·24λ�߾��Ȧ��� A/Dת�������ɱ������Ŵ�PGA�����˲����ȣ�ʵ���˶�����λ�Ƶĸ߾��Ȳ�����������Ҫ���ͻ���Ӧ�ýǶ�չ��̽�֣�ϣ����Ϊ��ߴ������ļ��ɻ��̶ȡ��ֱ��ʡ��ȶ��Ժ��˻�������������һ�㹱�ס�
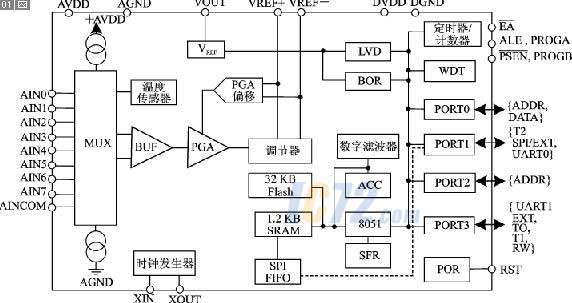
������������������������������ͼ1MSC1210 ADC����ͼ
1 ��ά���������ص���MSC1210���
λ�ƴ������ṹ��Ҫ���ʵ���ҵĻ�������ά�����������ṹ�ص㣬�������ͬ������˫E��ĤƬ�ṹ[4]�������øĽ��Ķ�ά������������������������ϵ�X��Y��ά�ϵ�����Ϣ���ٽ��任���ƽ���λ����Ϣ��ͬʱ�����ڻ�������ά�������������ϸı�����صĽṹ�����������̺�����Ȼ��ѧ������Ŀ�������ţ�60343006��60375027�������ȵȣ��Ա�ʵ�ֶ�С������λ����Ϣ�Ļ�ȡ��
��������������˾��Texas Instruments�����Ƴ���һ�ֹ��ܺ�ǿ�Ĵ�24λA/Dת������������MSC1210[5]��MSC1210����һЩ��ǿ���ԣ��ر��ʺϲ����߾����¶ȡ�ѹ������������������źš�MSC1210��Ҫ������ǿ��8052���������ġ����桢������ģ��ܺ��������衣��ǿ��8052���������İ���˫����ָʾ����ִ��ָ����ٶȱȱ�8052���Ŀ�3��������MIPS����ʹ�û��ܹ��������������Ż��ٶȡ����ʼ�������ͼ1��MSC1210 ADC �ķ���ͼ��
�߾���λ�ƴ�������·ģ��ĺ�����MSC1210��Ƭ������������źŵĶ�·�л����źŻ��塢PGA��̷Ŵ�24λ���� A/Dת���������˲������ݴ������ź�У�Լ�UARTͨ�ŵȹ���[6]�����½��λ�ƴ�������ʹ������Ҫ���ܡ�
MSC1210 ���븴������һ��ADC ������ÿ���������ž�������ض��IJ��������ó�����������롣������ADC ����ͨ�������������ȣ�MSC1210 �ɰ�һ�����Ŷ���Ϊ�����룬����һ������Ϊ�����룬ʹ��Ʒ������ɡ�λ�ƴ�����һ����·����ֱ��MSC1210 ADC��AIN0��AIN1����Ϊһ·������룻��һ����·����ֱ��MSC1210 ADC��AIN2��AIN3����Ϊ�ڶ�·������롣ADMUX�Ĵ�����ʼ����ֵΪ��ADMUX=0x01��
����TI��˾��MSC1210������˵�������뻺�����ɽ���ADC ������ƫ�ƵĿ����ԡ�ֻҪ�����źŵ�������������Ӧ�ò�������Ωһ���������뻺����������ǣ�����һ��ģ�������ϵ�����ѹ���������ѹ����1.5 V������������ʱ��MSC1210 �������迹��5 M����PGA�����û�����ʱ�����迹һ��Ϊ10 G���������ѹ��Χ��С��ͬʱģ���Դ�������ߡ��ڲ���������Ωһ��������£�ʵ���в�û��ʹ�û��壬��������ADC ���ƼĴ���(ADCON0.3) �е�BUF λ�����رջ��壬ȡ�õ�Ч��ȴ��Ϊ���룬��������������ƫ��仯��С��
�ɱ������Ŵ���(PGA) �����������Ϊ1��2��4��8��16��32��64 ��128������PGA �ɴ�����ADC ����Ч�ֱ��ʡ���Ȼ��������Ҫ��������������Ҳ��֮�Ŵ��ˡ�ʵ����λ�ƴ���������������Ϊ64��ȷ��˵��Ӧ����MSC1210 ADC��PGA�����棩��
MSC1210�����˲����п��ٽ�����sinc2 ��sinc3���֣�����һ���Զ�ģʽ ���������ŵ���PGA�ı���Զ�ģʽ�ɰ�sinc �˲����ĵ���ѵĿ���ѡ����л����µ��ŵ������ɰѿ��ٽ����˲�������������ת�������еĵ�һ��ת��Ӧ��������Ȼ��ʹ��sinc2�����ʹ��sinc3 �˲���������������ܡ����ֲ�������ͬʱ�ں�sinc3 �˲����ĵ��������ƺͿ��ٻָ�ʱ���˲����Ŀ�����Ӧ�������˲����е�sinc�������˲�����FIR�˲�����һ�֣������ڦ�����ADC���������ŵ�ͻȻ�仯ʱ�������Ҫһ��ʱ������ȷ��ʾ�µ����롣����Ҫ��ʱ��ȡ���������õ��˲��������͡�sinc2ͨ��������Ҫ2�����ڵ��������ʱ�䣬sinc3������Ҫ3�����ڵ��������ʱ�䣬������Ҫ1�����ڵ��������ʱ�䡣ͨ��˵��������sinc3�˲������������ŵ��ı�����Ȳ��������3�����ݲ���ʹ�ã�Ӧ��������ֻ�е�4����������ǿ�ʹ�õġ���һ��������Ҫ��
MSC1210�ȿ��Բ����ڲ��ο���ѹ��Ҳ���Բ����ⲿ�ο���ѹ���ο���ѹ�Ŀ����������ڲ� 2.5 V��ͨ��ADCON0�Ĵ�������ѡ��ο���ѹ��ʵ�����������ڲ��ο���ѹ��ͨ������ADCON0.4 (VREFH)ѡ��Ϊ 1.25 V����Ҫע����ǣ������ڲ� VREF�����������ⲿ������Ҫ��REFOUT���ű��������ӵ� VREF+���� VREF-���������ӵ� AGND���Ա��ڲ� VREF�ܹ���������������ƪ�����ƣ�MSC1210 ADC�����������ڴ˲������ܡ�
2 ��������Ӳ�����
ͼ2����������Ч��
 ����MSC1210 ADC�ĸ߶ȼ��ɻ���Ӳ��ϵͳ���ɺܼ�ࡣͼ2��λ�ƴ������IJ���Ч��ͼ��Ӧ�����Ƭͨ������Ĺ��գ����Ұ����ض��ķ���ճ����E��ĤƬ�ı����ϣ�������������Զ�����Ļ�˹ͨȫ�ŵ�·����Ϊԭʼ������Ϣ��ģ�������С�ɵĵ�·�屻������Բ�εĿ�֮�С� ����MSC1210 ADC�ĸ߶ȼ��ɻ���Ӳ��ϵͳ���ɺܼ�ࡣͼ2��λ�ƴ������IJ���Ч��ͼ��Ӧ�����Ƭͨ������Ĺ��գ����Ұ����ض��ķ���ճ����E��ĤƬ�ı����ϣ�������������Զ�����Ļ�˹ͨȫ�ŵ�·����Ϊԭʼ������Ϣ��ģ�������С�ɵĵ�·�屻������Բ�εĿ�֮�С�
������������������������������
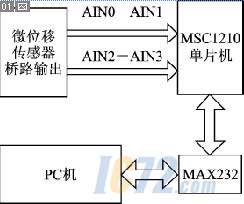
ͼ3Ϊʵ��ϵͳ�ĵ�·�ṹʾ�⡣ʵ��ϵͳ��Ҫ�ɴ��������壨���ԭʼ��ģ���źţ���MSC1210���ġ�����ͨ�ŵ�·��PC����ɡ���ǰ������λ�ƴ�����һ����·����ֱ��MSC1210 ADC��AIN0��AIN1����Ϊһ·������룻��һ����·����ֱ��MSC1210 ADC��AIN2��AIN3����Ϊ�ڶ�·������롣MSC1210ͨ��RS232��PC��ͨ�ţ�ʵ����Ϣ����ʾ�Ͷ�MSC1210�Ŀ��ơ�
ͼ3����ϵͳ��·�ṹʾ��
 3 MSC1210���ݲɼ�ϵͳ��������� 3 MSC1210���ݲɼ�ϵͳ���������
��MSC1210 ADC�ĸ��������ֵ����ý��Ἣ���Ӱ�촫���������շֱ��ʺ��ȶ��ԡ����磬���뻺����ʹ����ɱ�̷Ŵ��������ѡ������ʱ���ٶ�ѡ����ģ��������Լ��˲����ͺŵ�ѡ�ȣ���Щ�������趨������һ����ɵģ���ЩҪ������������ϡ����ԣ����յõ�����Ľ����Ϊ�˱���ÿ���ij��������������ص�Flash����洢���У�MSC1210�ڹ���֮ǰ��ADC�ij�ʼ��������PC����ȫ���ơ����ȣ�PC�������ֱ�Ҫ�Ŀ�����Ϣͨ�����ڴ���MSC1210��MSC1210������Щ��Ϣ������ADC�ij�ʼ�������������˵���ǣ�PC����MSC1210����6���ֽڣ���6���ֽ��а������˲����ͺš�ACLK��ADCON2��ADCON3�Ĵ����еij���ֵ����ģ�������ŵ������ʱֵ��������������������������Ϳɱ�̷Ŵ��������档Ȼ��MSC1210����ADC�ij�ʼ��������������������״̬��������ֵ�ǰ��������������Ѵ���Ԥ�����õı������������������������MSC1210����Ϊ���������ݼ����Ժ��������ݶ�����Ч���ˣ������������̽����ݷ���PC��������Ҫ������ģ������ͨ����Ȼ����ʹǰһ����ͨ�����������Ч�ģ������Ž�����һ������������ڡ�MSC1210�Ĺ������̿ɼ���ͼ4��ʾ��
ͼ4MSC1210��������
PC������MSC1210 ADC�ij�ʼ�������⣬��Ҫ����MSC1210ͨ��RS232���ڷ��������������ÿ��ӻ���ͼ��ʵʱ����ʾ�ڴ����ʵ�λ�á�ÿ��MSC1210��PC������4���ֽڡ���4���ֽ������¶���ģ���1���ֽڱ�ʾ��������ͨ���ţ�0��ʾAIN0��AIN1������룬��Xά����Ϣ��1��ʾAIN2��AIN3������룬��Yά����Ϣ���������ֽ���������ݵ�24λ�����Ʊ�ʾ����MSC1210 ADC��ת���������PC���������̼����뻺������4���ֽں�ȡ�����������ݣ�ͬʱ������뻺���������ݵ�1���ֽ�ʶ��ͨ��������ת��Ϊ��ѹֵ����ʾ����Ӧλ�ã���λ��mV���������ڴ����п�������ͼ����ʾ���ֱ�ʵʱ��ʾX���Y����źű仯�����Ϊ�˸��õع۲�źŵ�С�仯�������ṩ��ͼ�εķŴ���ʾ���ܡ�Ϊ�˷��㣬�Ŵ�����ѡΪ12.5����125����
4 ʵ����
�����������飬���ʵ�ʵ�Ҫ�����հ�λ�ƴ���������������ʶ�λ��10 Hz���ֱ��ʸߴ�15λ�����кܸߵ��ȶ��ԣ�ȡ��������Ч������ز���ѡ�����£�MSC1210���˲����ͺ�Ϊsinc3��ACLKΪ1��ADCON2��ADCON3�Ĵ����еij���ֵ��Ϊ1080����ģ�����뻺��رգ�ģ������ͨ���ı������3������������ڣ�����ƫ�ƺ������ڲ���У����ͼ5����λ�ƴ������ڹ���ʱ�����������ͼ����ʾ���������߷ֱ��ʾ����X���Y���ϵ������������������Ϣ���Է���ؼ����λ����Ϣ��
�˴����п�Ժ�Ϸ������������˴�����ʵ���Ҷ�ά�������������Ļ����ϣ�����MSC1210���������Ƴɹ���λ�ƴ��������������С���ֱ��ʸߡ��ȶ����ܺõ��ŵ㡣MSC1210��Ƭ����������SoCϵͳ���ǹ���ǿ������ݲɼ�оƬ�����Թ㷺Ӧ���������DZ�����غ͵���������
�����
1 ���ҹ�, ½����. ��λ�Ƶ���ƽ���Է���. ���м���ѧ��, 1997(6)
2 ��Ծ, ��ʿ��. ����λ�Ƶ���ʽ������������. �Ϻ���ѧѧ��, 1995(12)16
10
3 Sawada R, Higurashi E. Integrated micro��displacement sensor that can be incorporated into mini 3dimensional actuator stage. Broadband Optical Networks and Technologies: An Emerging Reality/Optical MEMS/Smart Pixels/Organic Optics and Optoelectronics. 1998 IEEE/LEOS Summer Topical Meetings
4 ���ٳ�. ��ά����������Ƽ��źŷ��������о��� �۲�ʿ���ģ�. �������й���ѧԺ�������������о�����2001
5 Texas Instruments. MSC1210 User��s Guide. 200212
6 ������, ����÷. ����MSC1210�Ķ�·�߾����¶Ȳɼ�ϵͳģ��. ���Ӽ���Ӧ��, 2003(7)
7 Texas Intruments. MSC1210 DataSheet. 200203��ɽ��˶ʿ�о�������Ҫ�о�����Ϊ�����˴����������˽����о�Ա����������Ҫ�о�����Ϊ�����˺ͻ����˴�������������ʵ��������Ϣ��ȡ�ʹ��������ݿ⼰֪ʶ�����Ӧ�á�
|