╤Ч║╒©ьжф╤тоСсКр╙гС
нрцгрт╧З╥ю©ф╪╪╢Ся╖╩З╣Г╧╓ЁлсКвт╤╞╩╞я╖т╨╩ЗфВхк╫ляпйрвНпбяпжф╣дпбр╩╢З╥бхк╡╫пп╩ЗфВхкн╙яп╬©╤тоСё╗фДмБпнхГм╪1кЫй╬ё╘║ё╦ц╩ЗфВхк╦ът╪1.55m,жьт╪65kg,й╧сц╣ГЁь╧╘╣Г,нчпХмБ╫с╣Гт╢╨м©ьжфпе╨еоъ,©иртй╣ожнчюбппвъ,╩╧©иртмЙЁихк╣дмх╡©║╒йж╡©╨мм╥╡©╣др╩п╘╩Ы╠╬╤╞вВ,ря╬╜ЁУ╡╫╬ъ╠╦акхкюЮ╣дмБпнльуВ║ё
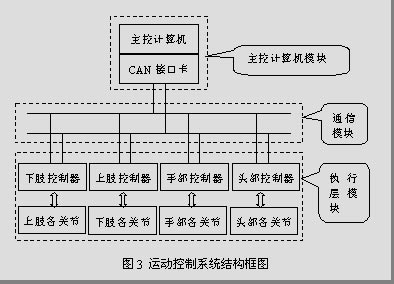
уБл╗пбпм╥бхк╩ЗфВхкр╩╧╡╬ъсп36╦Жвтси╤хё╗хГм╪2кЫй╬ё╘,фДжпиож╚12╦Ж,обж╚12╦Ж,м╥╡©2╦Ж,йж╡©10╦Ж;обж╚╦В╦Ж╧ь╫зспн╩жц╢╚╦пфВ,вЦ╡©сп╤Юн╛а╕/а╕╬ь╢╚╦пфВ;╬ъспйс╬У╢╚╦п║╒сОрТ©ьжфо╣мЁрт╪╟нчоърё©ьдё©И;уШ╦Ж©ьжфо╣мЁ║╒╣Гт╢╪╞Ёитз╩ЗфВхк╠╬лЕио║ён╙акй╧ж╝уФуЩ╬ъсп║╟╥бхк║╠╣дль╣Ц,©ьжфо╣мЁ╠ьпКдэ╧╩мЙЁи╟Эю╗тк╤╞©ьжфсК╧Ф╩╝║╒йс╬У╦пж╙╢╕юМ║╒сОрТй╤╠П╨мфДкЭ╩╥╬Ё╦пж╙тздз╣д╤Южж╧╕дэ║ёфДжп,тк╤╞©ьжфйгуШ╦Ж©ьжфо╣мЁ╣д╧ь╪Э,кЭ╠ьпКдэ╧╩бЗвЦртобр╙гСё╨
ё╗1ё╘о╣мЁ╪╞Ёи╤х╦ъ║╒лЕ╩Щп║║╒жьа©гА║╒╧╕бй╢С║╒п╖бй╦ъ╨м╩Зть╩╞║ё
ё╗2ё╘╦В╦Ждё©Иж╝╪Д╣да╛╫с╪Р╫Ю,╠Цсз╟╡в╟╨мн╛╩╓║ё
ё╗3ё╘©ьжффВс╕╬ъспа╪╨ц╣д╤╞л╛оЛс╕╨м╦ЗкФльпт,нхл╛нС╡Н╨м╬╡л╛нС╡Нп║║ё
ё╗4ё╘о╣мЁ╪╞Ёитз╩ЗфВхк╠╬лЕио,╣Г╢е╦ихе╫ог©,╠ьпК╬ъсп╫ог©╣д©╧╦ихедэа╕║ё
ё╗5ё╘╦В╡©╥ж╣дйЩ╬щ╫╩╩╩╠ьпКй╣й╠спп╖╨мв╪х╥©и©©║ё
хЩ║╒╤╞©ьжфо╣мЁиХ╪ф
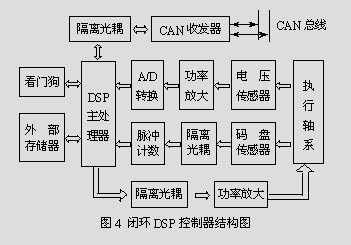
╦Ы╬щртиор╙гС,нрцгиХ╪факр╩жж╩ЫсзCANожЁ║вэоъ╣дпбпм©ьжф╫А╧╧║ёуШ╦Ж©ьжфо╣мЁ╡исц╪╞жп╧эюМ╥жи╒©ьжф╣д╥╫й╫,╟╢уу©ьжфо╣мЁ╣д╫А╧╧╨м╧╕дэ╩╝╥жн╙хЩ╡Цё╨вИж╞╡Ц║╒п╜╣В╡Ц║╒ж╢ пп╡Ц║ёфДжп,вИж╞╡Цси╩ЗфВхк╠╬лЕмБ╣др╩л╗╧╓вВу╬вИЁи,жВр╙╦╨тПй╣ожхк╩З╫╩╩╔║╒нчоъм╗я╤║╒сОрТ║╒йс╬Урт╪╟╨Йж╦аНиЗЁи╣х╧╕дэ,йТсзжгдэ©ьжф╥╤ЁК,╠╬нд╡╩вЖиНхКл╫лж;п╜╣В╡Ц╨мж╢пп╡Ц╤╪╪╞Ёитз╩ЗфВхк╠╬лЕио,мЙЁи╬ълЕ╣д©ьжфхннЯ,йТсзнОюМ©ьжф╥╤ЁК,йгнрцгм╗ЁёрБрЕио╣д©ьжфо╣мЁ,фД╬ълЕ╫А╧╧хГм╪3кЫй╬║ё
1║╒жВ©ь╪фкЦ╩Здё©И
жВ©ь╪фкЦ╩Зр╙гСлЕ╩Щп║║╒тккЦкы╤х©Л,м╗Ёё╡исцп║╟Е╧╓р╣©ьжф╪фкЦ╩З,м╛й╠еД╠╦р╨╬╖отй╬фВ╨мвтжфв╗сц╧╕дэ╪Эел,жВр╙мЙЁитзоътк╤╞╧Ф╩╝║╒╤╞вВ╪╤тк╤╞©ьжф║╒сОрТ╫╩╩╔©ьжф║╒йс╬У╣╪рЩ©ьжфрт╪╟хк╩З╫╩╩╔╣х╧╕дэ║ёкЭ╫сйэ╠╬╣ь╢╚╦пфВ╣дпео╒,╦Ы╬щр╩╤╗╣д©ьжфкЦ╥╗╨мхннЯр╙гС,й╣й╠иЗЁи╧ь╫зжАо╣╣дхннЯ╧Ф╩╝йЩ╬щ╡╒м╗╧ЩйЩ╬щ╢╚йДвэоъкмжа╦В╣в╡Цтк╤╞©ьжффВ║ё
2║╒м╗педё©И
жВ©ь╪фкЦ╩З╨м╦В©ьжффВж╝╪Д╡исцCANвэоъ╫Ьппм╗пе║ёCANё╗Controller Area Networkё╘вэоъйгс╕сцвНн╙╧Ц╥╨╣др╩жжожЁ║вэоъ,р╡йгд©г╟н╙ж╧н╗р╩сп╧З╪й╠Йв╪╣дожЁ║вэоъ║ёоЮ╤тсзр╩╟Цм╗певэоъ,кЭ╣дйЩ╬щм╗пе╬ъспм╩ЁЖ╣д©и©©пт║╒й╣й╠пт╨маИ╩Нпт║ёфДль╣ЦжВр╙спё╨
ё╗1ё╘CANвэоън╙╤ЮжВ╥╫й╫,мЬбГиохнр╩╫з╣Ц╬Ы©итзхнрБй╠©лоРфДкЭ╫з╣Ц╥╒кмйЩ╬щ║ё
ё╗2ё╘CANвэоъио╣д╫з╣Ц©иртм╗╧Щ╠Йй╤╥Ш╥жЁи╡╩м╛╣дсеох╪╤,бЗвЦ╡╩м╛╣дй╣й╠р╙гС║ё
ё╗3ё╘CANвэоъ╡исц╥гфф╩╣╣двэоъжы╡ц╪╪йУ,╣мсеох╪╤╫з╣Ц╡╩с╟оЛ╦ъсеох╪╤╫з╣Ц╣д╥╒км║ё
ё╗4ё╘CANвэоъ╫з╣Цтз40mдзм╗пекыбйвН╦ъ©и╢О1MBPS║ё
ё╗5ё╘CANвэоъио╣д╫з╣ЦйЩтз╠Йв╪ж║╦Яй╫об©и╢О╣╫110╦Ж,ю╘у╧ж║╦Яй╫об╪╦╨У╡╩йэочжф║ё
ё╗6ё╘╠╗нд╡исц╤лж║╦Яй╫,╢╚йДй╠╪Д╤л,ЁЖ╢Мбй╪╚╣м║ё
ё╗7ё╘CANвэоъм╗пе╫Ижй©ия║сцк╚╫йоъ,фД╫А╧╧аИ╩Н,а╛╫с╥╫╠Ц║ё
CANвэоъ╣дртиоль╣Цй╧ж╝й╝╥жййсцсз╩ЗфВхк©ьжф,╪Ьсз╢к,╠╬ндя║сцCANвэоъвВн╙╩ЗфВхк©ьжфо╣мЁ╣дм╗пе╧╓╬ъ║ё╬ълЕа╛╫с╥╫й╫н╙ё╨жВ©ь╪фкЦ╩Зм╗╧ЩCANвэоъ╫с©з©╗а╛╫с╣╫вэоъио,╦Втк╤╞©ьжффВр╡╤╪м╗╧Щвэоъйу╥╒фВ╧р╫с╣╫вэоъио,╤Ьгр©ирт╦Ы╬щй╣╪йгИ©ЖтЖ╪УйЩд©║ёсисзCANвэоъж╩сца╫╦Ыоъ╫Ьппм╗пе,╢С╢С╫╣╣мако╣мЁа╛оъ╣д╦╢тсЁл╤х,м╛й╠тЖг©ако╣мЁ╣д©и©©птдэ║ё
3║╒ж╢пп╡Цдё©И
ж╢пп╡Ц╢╕сзуШ╦Ж©ьжфо╣мЁ╣двН╣в╡Ц,си╡╩м╛юЮпм╣д©ьжффВвИЁи,жВр╙сцю╢©ьжф╦Втк╤╞╧ь╫зжАо╣╣д╬ълЕж╢пп╧ЩЁл║ёсисз╦Втк╤╞╧ь╫з╣Г╩З╣дпм╨е╡╩м╛║╒Ёпть╣джьа©╡╩м╛,╤т©ьжф╬╚╤х╣др╙гСр╡╡╩м╛,нрцг╥ж╠Пн╙ж╝иХ╪фак╡╩м╛╣дтк╤╞©ьжффВ║ё
╒ы©╙╩╥DSPтк╤╞©ьжффВ
м╥╡©╨миож╚╦╨тьжьа©╫огА,рР╢к╡исц©╙╩╥DSPтк╤╞©ьжффВю╢╤тм╥╡©╨миож╚╦В╧ь╫з╫Ьпп©ьжф║ёуБп╘©ьжффВ╡╩пХр╙╡ияЫ╨м╥╢ю║,ж╠╫с╫сйужВ©ь╪фкЦ╩З╥╒ю╢╣д©ьжфцЭаН,х╩╨СиЗЁиоЮс╕╣дж╢ппцЭаН╥╒╦Ь╦В╧ь╫зжАо╣,й╧ж╝в╙╣╫оЮс╕╫г╤х║ё
╒з©╙╩╥MCUтк╤╞©ьжффВ
йж╡©╦В╦Ж╧ь╫злЕ╩Щ╨мжйа©╤╪╨эп║,╧й╡исц©╙╩╥MCUтк╤╞©ьжффВю╢╫Ьпп©ьжф║ёуБп╘©ьжффВ╡исцMCS-51╣╔ф╛╩ЗвВн╙╢╕юМфВ,©иртж╠╫сг╤хК╣╫йжуфдз,кЭцг╫сйужВ©ь╪фкЦ╩З╣д©ьжфцЭаН,юШсцфДIOрЩ╫е╡ЗиЗпХр╙╣д╤Юб╥бЖЁЕ©ьжфпе╨е,©ьжфйж╡©╦В╧ь╫з╣дтк╤╞║ё
╒ш╠у╩╥DSPтк╤╞©ьжффВ
мх╡©кЫспжАо╣╬Ысиж╠аВ╪УкыгЩ╤╞пм╣Г╩З╧╧Ёи,╢ЬаЦн╩╪Л╡Б║╒бКел╨м╣Гн╩╪ф╥╢ю║рт╪╟╤Юн╛а╕/а╕╬ь╢╚╦пфВ,╫А╧╧╦╢тс║╒©ьжфдя╤х╢С║╒╬╚╤хр╙гСр╡╦ъ,╧й╡исц╠у╩╥DSPтк╤╞©ьжффВ║ёуБ╡©╥жйгуШ╦Ж©ьжфо╣мЁ╣д╧ь╪Э,р╡йгнрцгяп╬©╣джь╣Ц║ё
4║╒©ьжфо╣мЁаВЁл
уШ╦Ж©ьжфо╣мЁ╣д╬ълЕаВЁлн╙ё╨о╣мЁ©╙й╪ткпп╡╒мЙЁиЁУй╪╩╞╧╓вВ;жВ©ь╪фкЦ╩З╦Ы╬щ╧Ф╩╝╨м╪фкЦоР╣в╡Ц©ьжффВ╥╒км©ьжфцЭаН,╣в╡Ц©ьжффВ╫сйу╣╫цЭаН╨С,╫А╨о╦В╢╚╦пфВ╥╢ю║╣дпео╒,м╗╧Щр╩╤╗╣д©ьжфкЦ╥╗иЗЁиоЮс╕╣дж╢ппцЭаН╡╒╥╒км╦Ь╦В╧ь╫зж╢ппжАо╣,м╛й╠╟я╣в╡ЦжАо╣╣дткппгИ©Жио╢╚╦ЬжВ©ь╪фкЦ╩З,жВ©ь╪фкЦ╩З╦Ы╬щпб╣дгИ©Жты╡ЗиЗпб╣дцЭаН╥╒км╦Ь╦В©ьжффВ,хГ╢к╥╢╦╢║ёуБйбй╣иойга╫╦Ж╠у╩╥╥╢ю║╧ЩЁл,╣в╡Ц©ьжффВм╗╧Щ╢╚╦пфВсК╦В╧ь╫зжАо╣ж╝╪Д╫Ьппп║я╜╩╥╥╢ю║,жВ©ь╪фкЦ╩Зм╗╧Щ╦В©ьжффВсК╦В╧ь╫зжАо╣ж╝╪Д╫Ьпп╢С╩ьб╥╥╢ю║,уБяЫ©иртй╧╩ЗфВхк╬ъсп╦Э╤Ю╣д║╟жгдэ║╠,╦Э╨ц╣д╫ЬппюКоъй╣й╠©ьжф║ё
жВ©ь╪фкЦ╩Зц©цКжсоР╣в╡Ц©ьжффВ╥╒км200вИйЩ╬щ,╣в╡Ц©ьжффВоРжВ©ь╪фкЦ╩З╥╢ю║м╛яЫйЩд©╣дйЩ╬щ,╤ЬCANвэоъ╣двН╢См╗пекыбй©ирт╢О╣╫╪╦г╖ж║/цК,мЙх╚©иртбЗвЦ©ьжф╣др╙гС║ё
кд║╒©ьжффВоЙо╦иХ╪ф
©ьжфобж╚╣д╠у╩╥DSP©ьжффВйгуШ╦Ж©ьжфо╣мЁ╣д╨кпд╡©╥ж,Ёп╣ёвеуШ╦Ж╩ЗфВхк╣д╦╨тьжьа©,йДЁЖ╧╕бй╢С,╤т©ьжф╣д╬╚╤хр╙гСр╡╦ъ,рР╢ккЭ╣дптдэж╠╫с╧ьо╣╣╫╩ЗфВхктк╤╞╣дй╣ож║ёнрцгв╗цен╙ж╝иХ╪фак╩Ысзк╚н╩жц╢╚╦пфВ╣д╠у╩╥DSP©ьжффВ,фД╫А╧╧хГм╪4кЫй╬║ё
DSPжВ╢╕юМфВя║сц╣дйгTI╧╚к╬╣дTMS320LF2407Aп╬ф╛,кЭйгTI╪рвЕC2000о╣апжп╣д╦ъ╣╣╡Зф╥,╥гЁёййсцсз╧╓р╣©ьжф║ёкЭ╣да╫╦Жйб╪Ч╧эюМфВ╧╕дэсхн╙г©╢С,мЙх╚йгн╙╣Г╩З©ьжфиХ╪ф╣д,©июШсц╤Ю╦ЖPWMбЖЁЕм╗╣юж╠╫с╡ЗиЗпХр╙╣дPWMбЖЁЕ©ьжфпе╨е;фДCANвэоъдё©И©иртж╠╫ссКжВ©ь╪фкЦ╩З╫Ьппм╗пе╤Ь╡╩пХр╙тЖ╪сCANвэоъ©ьжффВ;мБ╡©©╢це╧╥©ирт╤т©ьжффВ╣Гя╧╫Ьпп╪Ю©ь;мБ╡©╢Ф╢╒фВжп╢Ф╥еве©ьжфкЦ╥╗кЫпХ╣д╠ьр╙╡нйЩ║ё
©ьжффВ╣дк╚н╩жц╢╚╦пфВси╣Гя╧йДЁЖ╢╚╦пфВ╨м╧Б╣ГбКел╢╚╦пфВвИЁи║ёфДжп,╣Гя╧╢╚╦пфВ╟яжАо╣╣дн╩жцпео╒в╙╩╩Ёи╣Гя╧пе╨е,╬╜╧Щ╥е╢С╣Гб╥╥е╢С,ты╬╜╧Щв╗це╣дA/Dв╙╩╩фВв╙╩╩ЁийЩвжпе╨екмхКDSPжВ╢╕юМфВ║ё╡╩сцTMS320LF2407Aвт╢Ь╣дA/Dв╙╩╩фВ╤Ьй╧сцв╗це╣дA/Dв╙╩╩п╬ф╛,уБйгн╙аклА╦ъв╙╩╩╣д╬╚╤х,рРн╙TMS320LF2407A╣дA/Dв╙╩╩фВкЫдэ╫сйэ╣двН╦ъв╙╩╩╣Гя╧ж╩сп3.3V,╤Ь╬╜╧Щ╧╕бй╥е╢С╨С╣д╣Гя╧т╤т╤Ё╛ЁЖак╢к╥╤н╖,кЫртй╧сцакв╗це╣дA/Dв╙╩╩п╬ф╛║ёуБ╡©╥ж╣Гб╥кДх╩тЖ╪сак©ьжффВ╣д╦╢тсЁл╤х,х╢©ирт╢С╢СлА╦ъв╙╩╩╬╚╤х,кЫртйгй╝╥жж╣╣ц╣д║ёбКел╢╚╦пфВ╟яжАо╣╣дн╩жцпео╒в╙╩╩ЁибЖЁЕпе╨е,╬╜╧Щ╧Б╣Г╦ТюКфВ╪Ч╦ТюК╨СкмхКв╗сцбЖЁЕ╪фйЩфВ,╪фйЩ╨С╣дпео╒кмхКDSPжВ╢╕юМфВ║ёбЖЁЕ╪фйЩфВя║сц╣╠╫ЯаВпп╣дCPLDфВ╪Ч,фДг©╢С╣д╧╕дэ╤тлА╦ъ©ьжффВ╣дптдэсп╨э╢С╣д╟ОжЗ,м╛й╠╩╧©иртвВн╙рКбК╣Гб╥н╙жВ╢╕юМфВлА╧╘рКбК╧╕дэ║ё
жВ╢╕юМфВм╗╧Щ╤т╫сйу╣╫╣д╢╚╦пфВпе╨е╫Ьпп╥жнЖ╨м╪фкЦж╝╨С╡ЗиЗоЮс╕╣дPWMбЖЁЕ©ьжфпе╨е,╬╜╧Щ╧Б╣Г╦ТюК╨м╧╕бй╥е╢С╨Скм╦Ь╣в╡ЦжАо╣©ьжфжАо╣╣дткпп║ёй╧сцк╚╢╚╦пфВ©ирт╢С╢СлА╦ъ╥╢ю║╣д╬╚╤х,а╫б╥пе╨е©иртм╛й╠©╪бг,р╡©иртр╩б╥н╙жВ,аМмБр╩б╥лА╧╘╡╧ЁД╨м╡н©╪║ё
жВ╢╕юМфВм╗╧ЩCANвэоъсКжВ©ь╪фкЦ╩З╫Ьппм╗пе,╫сйужВ©ь╪фкЦ╩З╣дцЭаН╡╒╟я╣в╡Цпео╒╥╢ю║╦ЬжВ©ь╪фкЦ╩З,й╣ож╦Э╦ър╩╪╤╣д╥╢ю║©ьжф║ёжВ╢╕юМфВм╗╧ЩCANвэоъйу╥╒фВа╛╫с╣╫вэоъио,н╙лА╦ъ╬╚╤х,жп╪ДпХр╙╫Ьпп╧Б╣Г╦ТюК║ё
╦ц©ьжффВж╠╫с╟╡в╟тз╥бхк╩ЗфВхк╣длЕдз,ц©╦Ж©ьжффВ©иртм╛й╠©ьжф6╦Ж╧ь╫зжАо╣,уШ╦Жобж╚ж╩пХр╙а╫╦Ж©ьжффВ╬м©иртй╣ожфДтк╤╞©ьжф║ё
нЕ║╒╫Абш
нрцгтзЁД╥жнЭйу╣╠╫ЯоЮ╧ья╖©ф╦ъ╪╪йУЁи╧Ш╣д╩Ы╢║ио,иХ╪фЁЖр╩лвкы╤х©Л║╒нх╤╗птг©║╒╪╞Ёи╤х╦ъ║╒╫А╧╧аИ╩Н║╒й╧сц╥╫╠Ц╣д╥бхк╩ЗфВхктк╤╞©ьжфо╣мЁ║ёуШ╦Жтк╤╞©ьжфо╣мЁ©иж╠╫сг╤хК╣╫╩ЗфВхк╠╬лЕдз,рт╠Цтзй╣╪йткппжпт╡бЗ╣ьмЙЁи╧Ф╤╗╣д©ьжфхннЯ║ём╛й╠,╦ц©ьжфо╣мЁ╩╧сп╨эг©╣дю╘у╧╧╕дэ,©ирт╥╫╠Ц╣ьрфж╡╣╫фДкЭюЮкф╣д©ьжф╩З╧╧жпх╔,йгр╩жж╤Ю╧╕дэм╗сцпм©ьжфо╣мЁ,╬ъсп╧Цю╚╣дс╕сцг╟╬╟║ё