0 引言
机器人足球是一个典型的智能机器人系统。其机器人(小车)控制系统的基本任务是:接收决策系统通过无线通信发射装置传来的运动控制指令,然后根据接收到的运动指令控制小车左、右轮的速度以实现规划的运动。机器人能否正确接收运动控制指令,决定于无线通信系统的性能。开发出通信速率高、集成度好、可靠性高、抗干扰能力强的无线通信系统对于赢得比赛具有重要的意义。
1 无线收发模块
1.1控制系统结构
机器人控制系统主要包括微处理器单元、无线接收单元、机器人ID编码单元、电机驱动单元、速度检测单元、电源单元等。系统结构框图见图1。

LPC2132芯片是一款内置Flash存储器、拥有ARM7TDMI-S内核的微处理器。通过无线收发模块,与上位机(PC机)实现无线通信。当微处理器接收到上位机发来的信息后,先对命令进行解释,实现PID、PWM算法,然后使能电机驱动电路,输出运动控制指令驱动电机,实现机器人左、右轮的启停、正反转和转动。
1.2无线收发模块
BIM-418(433)-F无线收发模块是英国Radiome-trix公司的一款低功耗超高频数据收发模块,载波频率分别为418 MHz和433 MHz,具有通信速率高、性能可靠、体积小的优点,只接少许外围电路即可工作,使用非常方便,既可发送又可接收。无线收发模块与微处理器LPC2132的接线见图2。模块15脚(发射允许端)接为高电平,禁止发射功能,16脚(接收允许端)接为低电平,使能接收功能。模块12脚RXD端为接收到的数据信息,11脚为载波测试端,该端为低时12脚的数据有效。
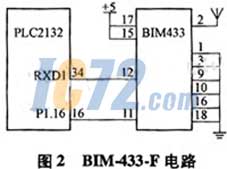
主要特性为:微型PCB(印制电路板)叠层结构;工作在业余无线电波波段;可双向传送;单向传输速率可达到40 kbit/s;室内有效范围为20 m,空旷处有效范围为100 m;工作电压范围4.5 V~5.5 V,工作电流小于15 mA;可与CMOS逻辑和TTL逻辑兼容。
2 通信方式
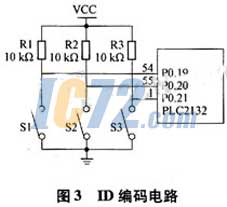
在机器人足球比赛过程中,机器人的无线通信协议采用广播式通信方式。上位机通过无线通信设备,每隔20 ms~30 ms发出一帧数据(规划场上所有机器人运动的控制命令),每个机器人全部接收,然后机器人根据自己的地址编号(机器人ID编码),从数据串中确定出发给自己的命令。每个机器人ID编码通过机器人车载控制板上的拨码开关来设定。接线电路见图3。
下面以上位机控制2台机器人为例说明数据接收和发送帧格式,见图4。上位机发送的数据帧格式为3字节的起始帧头(同步码),6字节的数据和1字节的校验码,即每次一帧发送10字节。

BIM-418(433)-F无线收发模块具有高灵敏度的特性,由于比赛环境存在各种干扰和噪声,它可能接收杂波并处理。因此,在每个数据帧之前要先发几字节的同步码,以实现数据的区分和同步。虽然干扰基本是随机的,但是若使用1字节的帧头,很难保证干扰和有效数据的区分。本系统协议使用3字节的帧头,它们的字码分别为2个55H和1个FAH。通过实践发现,干扰波产生连续55H、FAH、55H字码的概率很小,这种方法可以确保有效数据的确认。
3 程序
机器人无线接收程序是串行通信中断服务程序,其流程框图见图5。由流程图可知,必须通过启始同步码3道关验证,才能开始接收数据。一帧数据接收完后,字节还要进行CRC(循环冗余校验)。CRC校验字节是每个数据字节相互异或后的结果。接收到的数据校验正确则接收,否则放弃这帧数据。
4 干扰与噪声
造成无线通信系统可靠性不高的原因很多,主要原因是存在着各种噪声和干扰。它们的来源不向,有电台干扰、通信信号干扰及驱动左右轮的直流电机产生的干扰。在机器人足球比赛中,还有同频道干扰、邻道干扰以及系统设备本身所产生的各种噪声等。

为了抑制系统干扰及噪声,应尽可能提高无线模块的工作电压和发射功率。发射器是通过通信线缆与上位机相连的,发射器输入端加上光电隔离电路,以排除上位机的干扰。使用的发射和接收天线的长度保持一致,且均垂直于水平面向上。
通信中出现失误的情况是难以避免的,因此在通信协议中加入起始帧头和校验码,通过抗干扰方法设计接收软件程序,提高数据接收的准确性。
5 束语结
采用成熟的商业化的无线通信模块BIM-418(433)-F,对于缩短开发周期、确保通信系统的高度可靠性具有重要意义。开发出的系统具有结构简单、无调整器件、抗干扰性好、运行稳定等优点,已经成功应用于参加的机器人足球比赛实践中。 |