ƒø«∞£¨ π”√≥¨…˘≤®ºº ıΩ¯––ø’º‰≤‚¡ø∫Õ∂®Œª“—œýµ±∆’±È°£”–µƒ‘À”√≥¨…˘≤®µƒ∑¥…‰Ãÿ–‘£¨”–µƒ◊€∫œ‘À”√∫ÏÕ‚∫Õ≥¨…˘≤®¥´∏–∆˜≤…»°»˝±þ≤‚æýµƒ∂®Œª∑Ω∑®£¨«∞’þ“ÚŒ™ ≥¨…˘≤®¥´ ‰ΩÈ÷ µƒ”∞œÏ π≤‚¡øæ´∂»ŒÞ∑®Ã·∏þ£¨≥¨…˘≤®À•ºıÃÿ–‘ π∆‰¥´≤•µƒæý¿Î”–œÞ£¨‘Ÿ¿˚”√∑¥…‰Ãÿ–‘∏¸º”Àı∂áÀ¥´≤•µƒæý¿Î°£∫Û’þÀ‰»ªæ´∂»”–À˘Ã·∏þ£¨≤‚¡øµƒæý¿Î‘ˆº”¡À£¨µ´ «≥ˆœ÷¡À≤‚¡ø√§«¯µƒŒ £¨¥˝≤‚ƒø±Í‘⁄ƒ≥–©Œª÷√≤ªƒÐÕ¨ ±ºÏ≤‚µΩ3∏ˆ“‘…œµƒ≥¨…˘≤®–≈∫≈ ±£¨ πœµÕ≥ŒÞ∑®∂®Œª°£±æŒƒ‘⁄µ⁄2÷÷∑Ω∑®µƒª˘¥°…œ‘⁄œµÕ≥÷–º”»Î¡Àπ‚µÁ±ý¬Î∆˜≤‚æý∂®Œª‘≠¿Ì£¨œ˚≥˝∆‰∂®Œª√§«¯µƒŒ °£
1 ∂®Œª‘≠¿Ì
1.1 ∫ÏÕ‚≥¨…˘»˝±þ≤‚æý∂®Œª‘≠¿Ì
◊œ»‘⁄ “ƒ⁄Ω®¡¢“ª÷±Ω«◊¯±Íœµ£¨πÊ∂®∫√‘≠µ„°¢X÷·°¢Y÷·°¢∫ÕZ÷·°£‘⁄ “ƒ⁄…œø’πÃ∂®Œª÷√…Ë¡¢3∏ˆ≤Œøºµ„A°¢B°¢C£¨◊¯±Í∑÷±Œ™£®x1£¨y1£¨z1£©°¢£®x2£¨ y2£¨z2£©°¢£®x3£¨y3£¨z3£©°£ π”√∫ÏÕ‚≥¨…˘œµÕ≥≤‚≥ˆƒø±Íµ„µΩ3∏ˆ≤Œøºµ„µƒæý¿ÎL°¢M°¢NŒ™£∫
”… Ω£®1£©°´ Ω£®3£©Ω‚≥ˆƒø±Íµ„µƒ◊¯±Í÷µ£®x£¨y£¨z£©°£’‚æÕ «∫ÏÕ‚≥¨…˘µƒ∂®Œª‘≠¿Ì£¨ºÚµ•«“»ð“◊±ý≥à µœ÷°£œ¬√ÊÀµ√˜ƒø±Íµ„”Î≤Œøºµ„º‰æý¿Îµƒ≤‚¡ø‘≠¿Ì°£π‚ÀŸ”Î≥¨…˘≤®ÀŸ∂»‘⁄¡øº∂…œµƒº´¥Û≤Ó÷µ « µœ÷≤‚æýπ¶ƒÐµƒª˘¥°°£≤‚æý‘≠¿Ìº˚Õº1°£
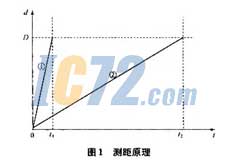
≥¨…˘≤®∫Õ∫ÏÕ‚π‚µƒ¥´≤•ÀŸ∂»Œ™≥£¡ø£¨∆‰¥´≤•æý¿Î”Î ±º‰µƒ«˙œþæ˘Œ™÷±œþ£¨÷±œþ–±¬ º¥≤®ÀŸ£¨“◊÷™«˙œþ¢ŸŒ™∫ÏÕ‚π‚«˙œþ£¨«˙œþ¢⁄Œ™≥¨…˘≤®«˙œþ°£÷∏∂®æý¿ÎD£¨…Ë∫ÏÕ‚π‚ ”Î≥¨…˘≤®‘⁄0 ±øÃÕ¨ ±¥”ƒ≥“ª≤Œøºµ„≥ˆ∑¢£¨∫ÏÕ‚π‚æ≠t1 ±º‰◊þÕÍ÷∏∂®æý¿Î£¨≥¨…˘≤®æ≠t2 ±º‰◊þÕÍ÷∏∂®æý¿Î£¨‘ÚD=vt2£¨ Ω÷–vŒ™≥¨…˘≤®ÀŸ°£¡Ót=t2- t1£¨ø…µ√D=v£®t+t1£©°£“—÷™∫ÏÕ‚π‚ÀŸŒ™3°¡108m£Øs£¨≥¨…˘≤®‘⁄ø’∆¯÷–ÀŸ∂»Œ™3.4°¡102m£Øs£¨‘⁄ “ƒ⁄’‚—˘µƒæý¿Î ∑∂Œß£¨Ω¸À∆»œŒ™t1=0£¨µ√µΩD=vt°£
œµÕ≥‘⁄√ø∏ˆ≤Œøºµ„∞≤◊∞µ•∆¨ª˙øÿ÷∆µƒ∫ÏÕ‚∫Õ≥¨…˘≤®∑¢…‰πУ¨‘⁄ƒø±Íµ„∞≤◊∞∫ÏÕ‚∫Õ≥¨…˘≤®Ω” ’πУ¨Õ¨—˘¡¨Ω”µ•∆¨ª˙°£ƒ≥“ª ±øÃ≤Œøºµ„∑¢…‰∫ÏÕ‚∫Õ≥¨…˘–≈∫≈£¨ƒø±Íµ„‘⁄Ω” ’µΩ∫ÏÕ‚–≈∫≈ ±∆Ù∂ص•∆¨ª˙µƒƒ⁄≤øº∆ ˝∆˜°¢‘⁄Ω” ’µΩ≥¨…˘–≈∫≈ ±Õ£÷πº∆ ˝∆˜£¨’‚—˘∂˛’þµƒ ±º‰≤Ót±ªº«¬ºœ¬¿¥£¨Ω´t”Î≥¨…˘≤®ÀŸœý≥ÀæÕµ√µΩ¥˝≤‚æý¿ÎD°£ µº …œ£¨–≈∫≈¥¶¿Ì◊Ð «”–—” ±µƒ£¨”…¥À¥¯¿¥µƒ≤‚¡øŒÛ≤Ó±ÿ–Î≤π≥•£¨◊Ó÷’µ√µΩÀ„ ΩŒ™£∫d=vt+n°£ Ω÷–£∫dŒ™æý¿Î≤‚¡ø÷µ£ªvŒ™≥¨…˘≤®ÀŸ£ªtŒ™µ•∆¨ª˙º«¬ºµƒ∫ÏÕ‚π‚∫Õ≥¨…˘≈˚µΩ¥Ôƒø±Íµ„µƒ ±º‰≤Ó÷µ£ªnŒ™œµÕ≥∆˜º˛—”≥ŸŒÛ≤Ó≤π≥•œÓ°£
1.2 π‚µÁ±ý¬Î∆˜≤‚æý∂®Œª‘≠¿Ì
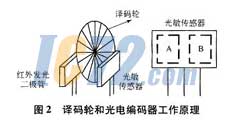
π‚µÁ±ý¬Î∆˜ «“ª÷÷Õ®π˝π‚µÁ◊™ªªΩ´ ‰≥ˆ÷·…œµƒª˙–µº∏∫ŒŒª“∆¡ø◊™ªª≥…¬ˆ≥ÂªÚ ˝◊÷¡øµƒ¥´∏–∆˜£¨’‚ «ƒø«∞”¶”√◊Ó∂ýµƒ¥´∏–∆˜£¨”…π‚’§≈Ã∫Õπ‚µÁºÏ≤‚◊∞÷√◊È≥…°£
π‚’§≈à «‘⁄“ª∂®÷±æ∂µƒ‘≤∞Â…œµ»∑÷µÿø™Õ®»Ù∏…∏ˆ≥§∑Ω–Œø◊°£”…”⁄π‚µÁ¬Î≈ã®≥∆Œ™“άά÷£¨º˚Õº2£©”εÁ∂ت˙Õ¨÷·£¨µÁ∂ت˙–˝◊™ ±£¨π‚’§≈ÔεÁ∂ت˙Õ¨ÀŸ–˝◊™£¨æ≠∑¢π‚∂˛º´πе»µÁ◊”‘™º˛◊È≥…µƒºÏ≤‚◊∞÷√ºÏ≤‚ ‰≥ˆ»Ù∏…¬ˆ≥–≈∫≈°£∑¢π‚∂˛º´πÐ∫Õπ‚√Ù¥´∏–∆˜◊È≥…π‚µÁÒÓ∫œ∆˜°£π‚√Ù¥´∏–∆˜ƒ⁄≤ø—ÿ¥π÷±∑ΩœÚ≈≈¡–”–2∏ˆπ‚√ÙæßÃÂπÐA∫ÕB°£”…”⁄“άά÷”–º‰œ∂£¨π µ±“άά÷◊™∂Ø ±£¨∫ÏÕ‚∑¢π‚∂˛º´πÐ∑¢≥ˆµƒ∫ÏÕ‚œþ ±∂¯’’‘⁄π‚√Ù¥´∏–∆˜…œ£¨ ±∂¯±ª◊Ë∂œ£¨¥”∂¯ ππ‚√Ù¥´∏–∆˜ ‰≥ˆ¬ˆ≥–≈∫≈°£π‚√ÙæßÃÂπÐA∫ÕB±ª∞≤ ∑≈µƒŒª÷√ πµ√∆‰π‚’’∫Õ◊Ë∂œµƒ ±º‰”–≤Ó“Ï£¨¥”∂¯≤˙…˙µƒ¬ˆ≥ÂA∫Õ¬ˆ≥ÂB”–“ª∂®µƒœýŒª≤Ó°£¿˚”√’‚÷÷∑Ω∑®£¨æÕƒÐ≤‚≥ˆ¬Î≈Ãπˆ÷·πˆ∂Ø∑ΩœÚ°£πˆ÷·√ø◊™∂Ø“ª∏ˆ–°Ω«∂»£¨≥µ¬÷ Œª÷√º∆ ˝∆˜º”1£¨√ø∏Ù“ª∂® ±º‰£¨µ•∆¨ª˙∞—≥µ¬÷Œª÷√º∆ ˝∆˜µƒ÷µ∂¡≥ˆ£¨Õ®π˝º∆À„µ√≥ˆ≥µ¬÷“∆∂صƒŒª“∆£®µ±–°≥µ◊™Õ‰ ±Œ™ª°œþ≥§∂»∫Õª°œþ«–œþ∑ΩœÚ£©£¨‘Ÿ∞—Œª“∆–≈œ¢∑¢ÀÕ∏¯…œŒªª˙°£
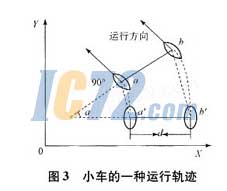
ª˘”⁄“‘…œ‘≠¿Ì£¨‘⁄Õ¨÷·∂˛¬÷«˝∂Ø–°≥µ£®Õ¨÷·∂˛¬÷«˝∂Ø–°≥µµƒ2∏ˆ¬÷◊”µƒ‘À––πϺ£◊Ð «∆Ω––µƒ£©µƒ2∏ˆ«˝∂ج÷◊”µƒ’˝…œ∑Ω“ª∂®∏þ∂»µƒa°¢b’‚2µ„∞≤◊∞∫ÏÕ‚≥¨…˘∂®Œªµ•‘™£¨æ¯∂‘∂®Œª√ø∏ˆµ„µƒ◊¯±Í°£‘⁄2∏ˆ¬÷◊”∏˜◊‘÷·…œ∞≤◊∞π‚µÁ±ý¬Î∆˜≤‚æýµ•‘™£¨”√¿¥≤‚¡ø2∏ˆ∂®Œª ±øõ„º‰¬÷◊”“∆∂صƒæý¿Î∫Õ«∞Ω¯µπÕÀ«Èøˆ°£
∂‘“∆∂Ø–°≥µµƒ∂®Œª∑÷Œ™3÷÷«Èøˆ£∫
a£© ‘⁄ƒ≥“ª∂®Œª ±øÃa°¢b’‚2µ„ƒÐπªÕ¨ ±ºÏ≤‚µΩ3∏ˆ≤Œøºµ„µƒ–≈∫≈£®µÿ√Ê «∆Ωµƒ£¨Ω¯––∆Ω√Ê∂˛Œ¨∂®Œª ±÷ª–Ë2∏ˆ–≈∫≈£©£¨æÕ”√∫ÏÕ‚≥¨…˘æ¯∂‘∂®Œª∑Ω∑®º∆À„“∆∂Ø–°≥µµƒŒª ÷√£¨º∆À„≥ˆÀ¸√«÷–µ„µƒŒª÷√£®º¥“∆∂Ø–°≥µµƒŒª÷√£©£¨≤¢∏˘æð«∞“ª ±øÃa°¢b’‚2µ„µƒ◊¯±Í°¢2∏ˆ¬÷◊”º‰µƒπÃ∂®æý¿Î≈–∂œ≥ˆ¬÷◊”œý∂‘”⁄À˘Ω®◊¯±Íœµµƒ‘À––∑ΩœÚ°£
b£© a°¢b÷–÷ª”–1µ„ƒÐπªÕ¨ ±ºÏ≤‚µΩ3∏ˆ≤Œøºµ„µƒ–≈∫≈£¨‘Ú∏˘æð«∞“ª ±øÃa°¢b’‚2µ„µƒ◊¯±Í°¢π‚µÁ±ý¬Î∆˜≤‚µ√2∏ˆ¬÷◊”µƒ“∆∂Øæý¿Î≥§∂ñ»Ωœ°¢2∏ˆ¬÷◊”º‰µƒÕ¨∂®æý¿Îº∆À„≥ˆ“∆∂Ø–°≥µµƒŒª÷√∫Õ‘À––∑ΩœÚ°£
c£© a°¢b’‚2µ„∂º≤ªƒÐÕ¨ ±ºÏ≤‚µΩ3∏ˆ≤Œøºµ„µƒ–≈∫≈£¨‘Ú∏˘æð«∞“ª ±øÃa°¢b’‚2µ„µƒ◊¯±Í°¢2∏ˆ¬÷◊”µƒπÃ∂®æý¿Î°¢π‚µÁ±ý¬Î∆˜≤‚µ√2∏ˆ¬÷◊”µƒ“∆∂Øæý¿Îº∆À„≥ˆ–°≥µµƒ◊¯±Í∫Õ‘À––∑ΩœÚ°£
œ¬√Ê∏¯≥ˆµ⁄2÷÷«Èøˆµƒ«ÛΩ‚∑Ω∑®£¨º˚Õº3°£Õ®π˝±»Ωœπ‚µÁ±ý¬Î∆˜À˘≤‚2∏ˆ¬÷◊”µƒ“∆∂Øæý¿Î£¨ø…µ√≥ˆ–°≥µœÚ“∆∂Øæý¿Î∂õƒ¬÷◊”“ª≤ý◊™Õ‰£¨“—÷™∫ÏÕ‚≥¨…˘≤‚µ√µƒ a°‰°¢b°‰°¢bµ„µƒ◊¯±Í£¨2∏ˆ¬÷◊”µƒº‰æýd£¨œþ∂Œaa°‰∫Õbb°‰∆Ω––£¨ab∫Õ–°≥µµƒ‘À∂Ø∑ΩœÚ¥π÷±£¨∏˘æðº∏∫Œ÷™ ∂ø…“‘«Û≥ˆaµ„µƒ◊¯±Í∫Õ–°≥µµƒ“∆∂Ø∑ΩœÚ£¨∆‰À˚«Èøˆ“ý»ª°£
2 œµÕ≥µƒ”≤º˛Ω·ππ
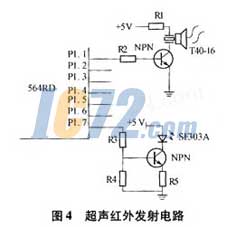
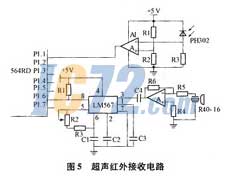
œµÕ≥÷˜“™”…≥¨…˘≤®–≈±ÍΩ⁄µ„£®≤Œøºµ„£©°¢“ª∏ˆ∫ÏÕ‚∑¢…‰πа¢“ª∏ˆ≥¨…˘≤®∑¢…‰Õ∑º∞∏˜◊‘µƒ«˝∂صÁ¬∑∫ÕŒ¢øÿ÷∆∆˜SST89E564RD£®“‘œ¬ºÚ≥∆564RD£©8Œªµ• ∆¨ª˙◊È≥…°£∆’Õ®Ω⁄µ„£®ƒø±Íµ„£©”…8∏ˆ∫ÏÕ‚Ω” ’πа¢8∏ˆ≥¨…˘≤®Ω” ’Õ∑º∞∏˜◊‘µƒ«˝∂صÁ¬∑∫Õ8∏ˆ564RD◊È≥…∫ÏÕ‚≥¨…˘Ω” ’µ•‘™£¨√ø“ª∏ˆ∫ÏÕ‚Ω” ’∫Õ≥¨…˘≤®Ω” ’Œ™ “ª∂‘£¨”√“ª∏ˆ564RDøÿ÷∆£¨∑÷≥…2◊È£¨√ø◊È4∂‘£¨‘⁄√ø∏ˆ¬÷◊”µƒ…œ∑Ω“ª∂®∏þ∂»º‰∏Ù90°„”ÎÀÆ∆Ω√Ê≥…45°„º–Ω«œÚ…œ∑÷≤º°£“ÚŒ™≤‚¡øµƒƒø±Íµ„ «“∆∂ØŒÔã¨À˘“‘≤…”√∂ýÕ®µ¿Õ¨ ±Ω” ’µƒ∑Ω∑®Àı∂Ã√ø¥Œ≤‚¡øÀ˘”√µƒ ±º‰£¨Ã·∏þ∂®Œªæ´∂»°£π‚µÁ±ý¬Î∆˜≤‚æýµ•‘™”…“άά÷°¢π‚µÁ≈º∫œ∆˜∫Õ“ª∆¨564RD◊È≥…°£”√1∆¨564RD◊˜Œ™÷˜øÿ–æ∆¨£¨”Î8∏ˆ≥¨…˘≤®Ω” ’µ•‘™°¢2∏ˆπ‚µÁ±ý¬Î∆˜≤‚æýµ•‘™ π”√¥Æø⁄Ω¯––Õ®–≈£¨÷˜øÿ÷∆∆˜‰¬»°∏˜∏ˆµ•‘™µƒ≤‚¡ø ˝æð£¨ÕÍ≥…∂®Œª‘ÀÀ„£¨Õ¨ ±∆µΩÕ¨≤Ω∏˜∏ˆµ•‘™π§◊˜µƒ◊˜”√°£564RDµƒæß’Ò∂ºŒ™40MHz°£Õº4∏¯≥ˆµ•∏ˆ∫ÏÕ‚πÐ∫Õ≥¨…˘≤®∑¢…‰µÁ¬∑£¨Õº5∏¯≥ˆµ•∏ˆ∫ÏÕ‚πÐ≥¨…˘≤®Ω” ’µÁ¬∑°£≥¨¬¨≤®µƒ∑¢…‰πÐŒ™T40-16£®∂‘”¶Ω” ’πÐŒ™R40-16£©£¨÷––ƒ∆µ¬ Œ™40kHz°£∫ÏÕ‚∑¢…‰πÐŒ™SE303A£®∂‘”¶Ω” ’πÐŒ™PH302£©£¨564RD”√2∏ˆI/Oø⁄∑÷± ‰≥ˆ‘ÿ∆µŒ™40kHz°¢µ˜∆µŒ™5kHzµƒ∑Ω≤®–≈∫≈«˝∂Ø∫ÏÕ‚∑¢…‰πУ¨“‘º∞‘ÿ∆µŒ™40kHz°¢µ˜∆µ2kHzµƒ∑Ω≤®–≈∫≈«˝∂Ø≥¨…˘≤®∑¢…‰πа£
3 œµÕ≥µƒ»Ìº˛…˺∆
œµÕ≥…œµÁ∫Û∏˜µ•‘™Ω¯––≥ı ºªØ£¨∏˜≤ø∑÷π§◊˜»Áœ¬£∫
a£© ≥¨…˘≤®–≈±ÍΩ⁄µ„≤ª∂œœÚÕ‚∑¢…‰∫ÏÕ‚∫Õ≥¨…˘≤®–≈∫≈£¨√ø∏ˆΩ⁄µ„µƒ∫ÏÕ‚”Î≥¨…˘≤®–≈∫≈±ý¬Îœý∂‘”¶£¨≤¢«“”Î∆‰À˚Ω⁄µ„µƒ–≈∫≈±ý¬Î≤ªÕ¨°£
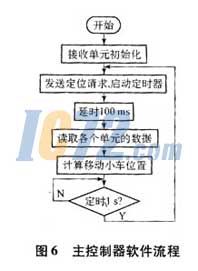
b£© ∆’Õ®Ω⁄µ„√ø∏Ù1s£®ø…“‘∏ƒ±‰£¨µ´≤ªƒÐô≥§£¨∑Ò‘Ú–°≥µ≥ˆœ÷π’Õ‰ ±‘À––πϺ£ø…ƒÐ≤ª∆Ω––£©Ω¯––“ª¥Œ∂®Œª£¨÷˜øÿ÷∆∆˜Õ®π˝¥Æø⁄œÚ∏˜∏ˆµ•‘™∑¢≥ˆ∂®Œª–≈∫≈≤¢∆Ù∂؃⁄≤ø∂® ±∆˜£¨—” ±100 ms∫Û“¿¥Œ∂¡»°8∏ˆ≥¨…˘≤‚æýµ•‘™À˘≤‚µ√µƒa°¢b’‚2µ„µΩ≤Œøºµ„µƒæý¿Î–≈œ¢∫Õ2∏ˆπ‚µÁ±ý¬Î∆˜≤‚æýµ•‘™º«¬ºµƒŒª“∆–≈œ¢£¨º∆À„≥ˆ“∆∂Ø–°≥µµƒŒª÷√∫Õ‘À––∑ΩœÚ°£∂® ±∆˜∂® ±µΩ1s∫Û÷ÿ∏¥¥Àπ˝≥ð£÷˜øÿ÷∆∆˜µƒ»Ìº˛¡˜≥ûÁÕº6À˘ æ°£
c£© 2∏ˆπ‚µÁ±ý¬Î∆˜≤‚æýµ•‘™≥ı ºªØ∫Û¡¢øÃø™ ºº«¬º¬÷◊”µƒŒª“∆£¨¥Æø⁄ ’µΩ∂®Œª–≈∫≈∫Û£¨Ω´º«¬ºµƒŒª“∆–≈œ¢¥ÊµΩ÷∏∂®Œª÷√£¨µ»¥˝÷˜øÿ÷∆∆˜∂¡»°£¨≤¢¥”0ø™ ººÃ–¯º«¬ºŒª“∆«Èøˆ°£
d£© ∆’Õ®Ω⁄µ„ºÏ≤‚µΩ∂®Œª–≈∫≈∫Û£¨Ω” ’∫ÏÕ‚∫Õ≥¨…˘≤®–≈∫≈£¨º«¬º“ª◊Èœý∂‘”¶µƒ∫ÏÕ‚≥¨…˘–≈∫≈µƒ≥¨…˘≤®¥´ ‰ ±º‰£¨¥ÊµΩ÷∏∂®µƒŒª÷√£¨µ»¥˝÷˜øÿ÷∆∆˜∂¡»°°£‘⁄¥Æø⁄Ω” ’µΩ∂®Œª –≈∫≈µƒø™ º100 ms ±º‰ƒ⁄”–’‚—˘µƒ–≈∫≈£¨‘Ú∞—µ⁄1¥ŒΩ” ’µΩ∂‘”¶µƒ ±º‰¥Ê»À÷∏∂®µƒŒª÷√æÕ≤ª‘ŸºÏ≤‚Ω” ’¡À£¨»Áπ˚100 ms ±º‰ƒ⁄√ª”–ºÏ≤‚µΩœý”¶µƒ–≈∫≈£¨æÕÀÕ ˝æð0µΩ÷∏∂®µƒŒª÷√°£
4 œµÕ≥ŒÛ≤Ó∑÷Œˆº∞ µ—È≤‚æýΩ·π˚
∂®ŒªŒÛ≤Ó÷˜“™”–“‘œ¬5∑Ω√Ê£∫≥¨…˘≤®∆˜º˛µƒ–Œ◊¥∫Õ∞≤◊∞Œª÷√‘Ï≥…◊¯±Íœµ≤Œøºµ„∫Õ¥˝≤‚ƒø±Íµ„µƒŒª÷√∆´≤Ó£ªœµÕ≥µÁ¬∑∆˜º˛—”≥Ÿ≤˙…˙µƒŒÛ≤Ó£ª–°≥µ «≤ª∂œ‘À∂صƒ£¨”…”⁄≥¨ …˘≤®¥´ ‰ÀŸ∂»±»Ωœ¬˝£¨«Î«Û∂®Œª ±øõΩ∂®ŒªÕÍ≥…£¨–°≥µ“—æ≠“∆∂Ø¡À“ª∂®µƒæý¿Î£ª‘⁄≤ªƒÐ¡¨–¯ºÏ≤‚µΩ◊„πª≤Œøºµ„–≈∫≈ ±£¨Œª÷√µƒ»∑∂®“¿øø«∞“ª ±øõƒ≤‚¡ø£¨ª·‘Ï≥…¿€º∆ ŒÛ≤Ó£ªŒ¬∂»Ãıº˛∂‘≥¨…˘≤®µƒ”∞œÏ°£
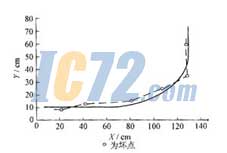
Õº7∏¯≥ˆ¡À‘⁄ “Œ¬20°Ê°¢≥¨…˘≤®ÀŸ∂»Œ™340m/s°¢–°≥µ2∏ˆ¬÷◊”º‰æý¿ÎŒ™0.2m°¢“∆∂ØÀŸ∂»Œ™0.2m/s°¢∆Ω√Ê∂˛Œ¨∂®Œª µ—È≤‚¡øµƒ“ª∂ŒπϺ££¨ µ—ÈÕ®π˝∂‘«∞3∏ˆ∑Ω√ÊŒÛ≤Ó≤π≥•º∆À„£¨ π∂®Œªæ´∂»¥ÔµΩ3cm°£
5 Ω· ¯”Ô
“ÚŒ™π‚µÁ±ý¬Î∆˜≤‚æý∂®Œª“¿øø«∞“ª≤‚¡øµ„µƒ–≈œ¢£¨±ÿ»ªµº÷¬∂®ŒªŒÛ≤Óµƒ¿€ª˝£ª∂¯∫ÏÕ‚≥¨…˘»˝±þ≤‚æý∑® «“ª÷÷÷ª“¿øøµ±«∞≤‚¡øµ„–≈œ¢µƒæ¯∂‘Œª÷√∂®Œª∑Ω∑®°£¥ÀœµÕ≥◊€∫œ¡À’‚2÷÷∑Ω∑®£¨œ˚≥˝¡À¿€ª˝ŒÛ≤Ó£¨≤¢Ω‚戡À∂®Œª√§«¯µƒŒ £¨∂‘“∆∂Ø–°≥µ”–“ª∏ˆΩœ◊º»∑µƒ∂®Œª°£
|