1 引 言
通常对ISAR成像的研究都是基于理想的散射点模型进行的,即对平稳飞行的非合作性目标经过运动补偿后,运动目标等效于匀速转动的转台目标,在不大的视角范围内,该目标的散射特性可以用一系列散射点来近似,而且在成像期间,这些散射点的相对位置、强度均不发生变化。
要实现对ISAR的有效干扰,必须根据当前转台目标的运动参数和扫描方式,利用截获的雷达信号进行延时复制,并且进行幅度和相位的调制,使复制的假目标信号不仅与雷达脉冲波形保持一致,还必须在脉冲重复周期期间满足相应的距离、多普勒变化规律。这样得到的假目标信号才能如真实雷达回波一样,出现在最后的图像上,达到好的干扰效果。采用一般的延时转发加调制的方法很难奏效,而采用数字射频存储器则能很好地完成对ISAR雷达的回波信号的延迟转发,从而提高了对ISAR的干扰效果。
2 DRFM干扰设备原理
数字射频存储器是将输入的模拟信号变成顺序的数字量,保存在数字存储器中,需要时再从存储器中读出,转换成模拟信号输出。他是一种用于实现射频信号存储及转发功能的新型电子部件。DRFM系统结构如图1所示。

为了精确复制射频信号,数字射频存储器首先根据接收到的射频信号频率调谐本振,使正交下变频器的输出频率位于基带(中频)内,然后将下变频器所产生的基带同相信号(I)和正交信号(Q)进行量化存储。需要时再重构I,Q信号,经正交上变频器输出。为了保证对原始信号复现的精确性,要求上变频与下变频使用同一本振。
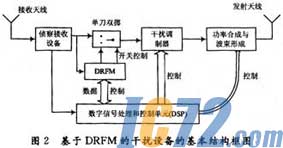
基于DRFM的干扰设备是利用数字射频存储器将截获到的ISAR信号存储其中,经过适当的时间延迟和干扰调制形成干扰信号发送出去,作用于雷达的目标检测和跟踪系统,使其不能正确地检测真正的目标或不能正确地测量真正目标的参数信息,从而迷惑和扰乱雷达对真正目标的检测和跟踪。基于DRFM的干扰设备的基本结构如图2所示。其中单刀双掷开关的作用是控制干扰信号的时间延迟,一路信号直接通过开关,其时间延迟理论上等于0,另一路信号通过DRFM,再经过单刀双掷开关,此时的时间延迟由控制单元控制。
3 基于DRFM的ISAR转台点目标干扰
基于DRFM技术模拟点目标来实现ISAR欺骗性干扰,其基本原理如图3所示。
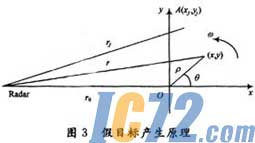
对于目标固定的情况,参考点o到雷达的距离r0是恒定值,可以利用将发射信号延迟2 r0/c作为本振信号与回波进行混频后进行转台成像处理。然而,在实际中目标是运动的,参考点o到雷达的距离r0为变化量,必须将其补偿掉,才能进行转台成像。假设运动补偿后已经侦收到ISAR发射信号调制中的关键参数,并且干扰机位于目标上,即真实目标和干扰机的坐标为(x,y),由于ρ<<r,所以r可近似表示为:

干扰机向ISAR发射与之相同的线性调频信号,其路程是单程的,所有干扰信号到达雷达的时延是r/c。假设要在(xJ,yJ)处生成一个假目标,那么此点目标A在同一时刻与ISAR的距离为:

此路程是双程的,所以雷达从发射到收到该点目标反射回来的回波信号的时延是2 rJ/c,若要让ISAR误认为A处存在目标,应满足如下关系:

其中,τ表示干扰机应该延迟发射信号的时间,由干扰方设定。这样,ISAR认为他收到的信号就是从A处反射回来的回波信号,从而达到欺骗干扰的目的。
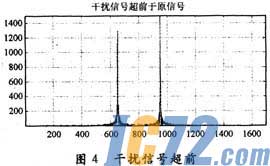
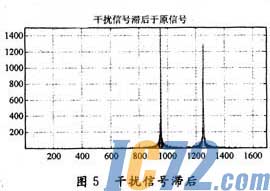
当要在真实目标点附近产生假目标时,要求DRFM适当控制干扰信号的延迟时间:当干扰信号延迟时间小于真实目标回波时间延迟时,假目标位置超前;当干扰信号延迟时间大于真实目标回波时间延迟时,假目标位置滞后。
图4和图5中给出了不同延时干扰结果,其中横、纵坐标分别表示采样点数。
设雷达发射线性调频信号为:

其中f0为起始频率,Tp为脉宽,k为调频斜率。
某点目标到雷达的距离为Ri,雷达接收到的该点目标的回波为:

由于利用DRFM所得的干扰信号仅是对接收到的雷达信号的简单复制或是再进行一定的幅度相位调制后的延时,即干扰信号可以表示为:

U表示幅度调制系数,r表示延迟时间,由干扰方决定。仿真时可令U=1,保证了干扰信号与雷达回波信号之间的相参性,从而提高对ISAR的干扰效果。
在上面分析的基础上,在真实目标背景下,在该区域内制造一个假目标,由于对该目标先进行一定的处理形成干扰信号,该信号与ISAR回波信号具有一定的相参性,通过ISAR对假目标的成像,从而会对假目标进行同样的成像处理,处理后的假目标成像仿真结果如图6所示,横坐标表示目标的纵向距离,纵坐标表示目标的横向宽度,从而实现了对ISAR转台模型的假目标欺骗干扰。

4 结 语
雷达与干扰机之间的矛与盾的斗争,随着新技术在雷达和干扰机中的不断应用,干扰与抗干扰在对抗中发展,对ISAR的欺骗干扰在DRFM技术成熟以后发展成一种有效的干扰方式,但这绝不是一劳永逸的,而有一点可以相信,欺骗干扰仍然是干扰技术一个重要的发展方向。 |