系统自动检测每个施工层的呼叫信号,判断呼叫信号的上、下行状态,并根据吊笼的运行位置及载荷情况,自动控制吊笼的上升、下降。当主控系统响应某一楼层呼叫信号时,系统在吊笼接近到达指定楼层时自动发出减速停靠指令,使吊笼准确停靠在指定楼层上,方便施工人员及物料的上、下操作。
3 nRF401芯片在楼层呼叫信号系统中的应用
在高层建筑施工过程中,由于施工计划的安排,多个施工楼层有施工人员在进行交叉施工,这就造成了对施工人员及材料的不同需求,不同的施工楼层均可能有呼梯请求。为了提高施工升降机的运输效率,解决各施工楼层与吊笼之间的信号联系,设置楼层呼叫信号控制系统。
在各施工楼层设置呼叫信号按钮,利用数字编码技术将所有各呼梯按钮连到呼叫信号总线。以34层为例,如果按传统方法在每一施工层上设置上/下行呼叫按钮,则信号线就需要66根,这势必造成信号线多,成本高,为尽可能减少信号线的数量,本系统采用二进制数字编码技术,即26=64,需6根信号线,再加2根电源线共需8根线就解决了问题。
呼叫信号控制系统中央处理单元采用8051单片机,经处理后的呼叫信号通过nRF401芯片发射输出,在呼叫信号控制系统中将nRF401设置成单发射模式,nRF401与8051单片机连接原理图如图1所示。
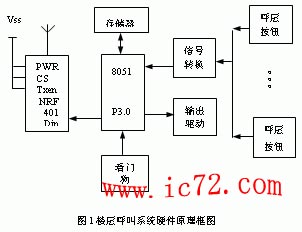
图1中,nRF401芯片“Txen”,“PWR-up”,“CS”端均接高电平,分别表示系统在上电后始终处于“发射模式”、“正常工作模式”和“工作频道为通道1”。
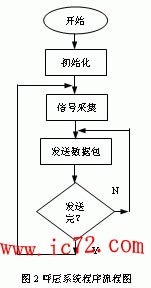
楼层呼叫系统控制程序流程图如图2所示。
4 nRF401芯片在吊笼主控系统中的应用
主控制系统根据呼叫信号控制系统传输来的楼层呼叫信号控制吊笼的启/停和选层、平层。两吊笼主控制系统同时接收楼层呼叫系统发送来的呼叫信号,分别对呼叫信号进行处理并对各自主回路进行控制。
吊笼主控制系统硬件结构框图如图3所示。
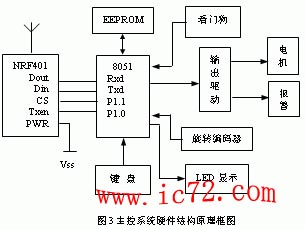
吊笼主控制系统采用8051单片机为CPU,nRF401芯片发射/接收模式由程序控制,在接收由楼层呼叫系统发射来的呼叫信号时,将nRF401设置成接收模式。Dout、Din分别和单片机的Rxd和Txd端相连,作为发射和接收时的数据传输。CS、Txen分别和P1.1、P1.0端相连,由单片机的P1.1、P1.0端对其工作频道和工作模式进行程序控制。
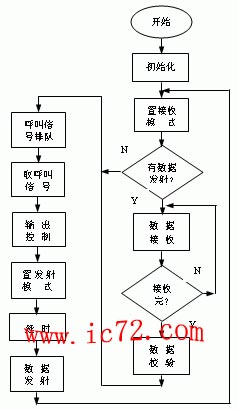
吊笼主控制系统软件流程图如图4所示。
5 两吊笼之间无线通信
在高层建筑施工中,由于施工升降机多为双笼式结构。两吊笼根据各施工楼层呼叫信号的需求,分别往返于各施工楼层之间进行施工人员、物料、设备的运输。如果在收到某一呼叫信号后,两吊笼都向这个施工层开去,势必造成设备的浪费,降低运输效率。为此,两吊笼之间有必要互相联系。当一个吊笼响应某一施工楼层的呼叫信号时,同时给另一个吊笼发出一个信号,这样,另一个吊笼在收到该信号后即取消该楼层呼叫信号,转而响应其它施工楼层的呼叫信号。反之,亦然。这样两个吊笼之间就避免运输的冲突,提高了运输效率。
两个吊笼之间的相互联系可以利用已有nRF401芯片实现。由于nRF401通信的双向性,利用程序对其进行控制。在一个吊笼响应某一楼层呼叫信号时,程序将nRF401设置成发射状态,将一信号发射出去,另一个吊笼为接收状态,在收到另一吊笼发射来的信号时,自动从呼叫信号列表中将该目标层去掉。反之,亦然。这样,两个吊笼主控系统之间利用已有的nRF401芯片资源,进行二者之间的运行协调,降低了运行成本,提高了运输效率。
通过利用无线收发芯片nRF401,实现了施工升降机楼层呼叫系统和吊笼主控系统之间的无线信号联系,提高了施工升降机的自动化控制水平。
