引言
本文介绍了一种先进的片上嵌入式仿真系统功能及其应用实例。由于该系统集成在MCU内部,包括复杂断点设置、触发序列发生器及处理器状态存储器等多种功能模块,使工程师在设计电路中实现调试功能。
调试方法对比
调试是嵌入式产品开发人员的主要工作之一。随着电路设计趋于复杂化,调试过程也变得愈加困难和耗时。仿真器的不足之处在于不能准确再现实际应用时的工作状态,许多仿真器仅仅仿真了CPU内核及少数外设。不过,仿真器也有诸多优点,可提供代码覆盖、配置及条件断点等功能。嵌入式应用通常涉及多个软硬件交互过程。由于MCU工作在不同环境下,实时事件有时由外接电路产生,有时由自身集成的ADC或者计时器产生。有时,MCU还与DSP配合组成更加复杂的系统。在只有CPU内核的仿真器环境内调试、校验IC间通信软件并不容易。
另一种常用方法是使用电路内仿真器(ICE),它使用适配器替代目标电路板MCU,并连接了用于模拟MCU活动的复杂电路,同时提供调试功能。ICE吸收了仿真器在真实环境实时运行软件的优点,但其价格昂贵、体积较大且无法提供100%精确度,尤其是涉及到ADC、DAC、比较器、振荡器及电压参考电路等模拟外设时。
通过在MCU中增加具备调试功能的嵌入式仿真器克服了上述缺点。嵌入式仿真过程中,调试用主机通过JTAG等串行接口直接连接到片上仿真逻辑电路。应用程序代码在MCU的运行状况与没有连接调试接口时相同。由于软件是在实际工作环境下调试,所以在软件开发完成后无需与硬件再进行调试。
某些8位和16位微型控制器现在也具备了嵌入式调试功能,但大多数还只能提供存储器存取、CPU执行控制及硬件断点设置等基本功能,与成熟的ICE相比还有较大的提高空间。最新16位MCU提供的嵌入式仿真模块增加了更多新功能,从而缩小了与ICE的差距,下面将介绍部分新型MCU高级调试功能及应用实例。
EEM系统构成
TI MSP430 MCU中集成的增强型嵌入式仿真模块(EEM)包含以下功能块:基本触发器、触发器组合逻辑发生器、触发器序列发生器、触发器动作、状态存储及时钟控制单元(如图1所示)。
要使用EEM进行调试,则至少要配置八个可用基本触发器输入中的一个。一般情况下,只能对CPU地址总线(MAB)指定的内存位置停止执行程序进行触发器设置。但现在MCU中的触发器能够支持非常复杂的设置。除了地址总线以外,所有触发器还可通过配置来监控CPU数据总线(MDB)、内部CPU寄存器及部分处理器控制信号。此外,如果需要则可以在地址及数据总线触发器加入位掩码以隔离需要的值,常数及“等于”、“不等于”、“小于”和“大于”等比较选项可以使用。以上这些功能组合起来即可实现复杂的断点设置。
通过将可用基本触发器输出的逻辑功能进行组合形成了复杂触发器。用户可以自行定义本单元的触发器输出,即基本触发器输入的组合逻辑。例如,组合地址、数据总线触发器后即可监控存储器某一位置是否发生了特定值的读/写操作。这个复杂的触发器事件可以用作直接停止执行某个程序或产生一个状态存储事件。同时,触发器序列发生器(具有四种状态的嵌入式状态机)可以对触发器时间进行设定。触发器所建立的可编程转换条件引起在几种状态间的动作转换。当序列发生器到达最后事件状态时,MCU可配置为停止程序运行和/或产生一个状态存储事件。
状态存储单元可以使用任何复杂触发器,该存储单元是一个环形缓冲区,最多含有8条记录,每条记录分别是16位地址总线、16位数据总线以及CPU部分重要控制信号在触发发生时的快照。可以将其看作能够采集状态信息而又不会影响MCU软件实时运行的简单跟踪缓冲区。当基本触发事件发生时或在每个CPU时钟周期,可以用触发器组合逻辑或触发器序列输出捕捉系统快照。
现在某些MCU的EEM附带了时钟控制单元,三个可用内部时钟树信号均可驱动ADC、LCD驱动器、计时器及串行通信模块等不同外设。停止程序执行时,时钟控制单元能对每个模块进行配置而使外设继续得到时钟信号。当处理器在调试过程中停止时,时钟将停止,如果仿真模块简单停止所有时钟(如到达断点时),则可能发生通信字符丢失或A/D转换结果有误等不必要的副作用。另一种实现方法是仿真停止时继续向外设提供时钟,但是该解决方案可能引起计时器等模块永久设置中断标志(即使是在CPU停止时),使源代码进入单步运行。使用时钟控制单元,开发人员可以有选择地向应用模块发送时钟信号。
利用EEM建立复杂断点
EEM具有设定程序断点的能力,如果能够为断点增加一个条件则在众多情况下可简化调试环境。例如,用C语言编写的嵌入式应用程序实现复杂的状态机。当前状态存储为全局变量,可在整个源代码的不同位置得到更新。应用时,全局变量在错误条件下进入了状态‘3’。如果要找出引起意外转换的源代码段,需要监控状态机变量‘StateVar’,当该值为‘3’时,利用EEM模块触发器即可停止程序运行。该复杂断点是两个基本EEM触发器的逻辑与组合。图2为如何实现复杂触发器的简化示意图。
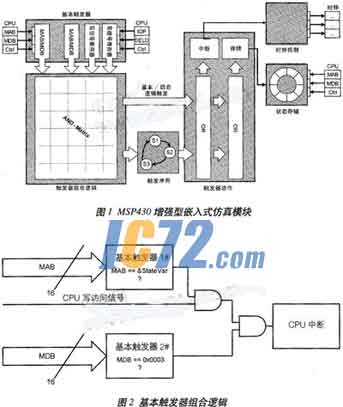
一个基本触发器配置后,用于监控器MAB状态机变量‘StateVar’地址及CPU写访问控制信号,其他触发器用于监控MDB是否为3。这样配置EEM后,即可实现当指令将‘3’写入变量‘StateVar’时,程序马上停止运行。这样就能轻松找出引起这个误写操作的代码段。同样的机制也可以用于RAM、闪存及外设模块的访问。
使用每个基本EEM触发器都具备的位掩码功能可以进一步对该复杂触发器进行配置。例如,客户在运动手表中应用超低功耗MCU时发现了一个问题:端口1的引脚3的设定值异常。端口1在应用中的作用是控制各种外部电路,所以在代码运行过程中受到多次访问。
现在的任务是找出哪一条CPU指令和哪一行源代码引起该端口引脚值的意外改变。如上所述,复杂EEM断点可用于监控端口1的输出寄存器,而使用位掩码功能则能够隔离第3位,具体做法是将掩码与值设为0x0008,将触发器比较值设为0x0008。MDB EEM触发器在每次比较前先执行与操作。CPU继续运行,当执行代码将端口1输出寄存器设定为3时马上停止程序执行。程序运行几次之后就能确定引起意外操作的C表达式。
寻找堆栈指针中的BUG
堆栈溢出是嵌入式应用的常见错误。大多数MCU,架构在RAM中分配堆栈空间,但RAM空间有限,且经常由其他变量及程序单元共享,MCU通常在程序初始化时将堆栈指针置于RAM空间的顶端。根据开发工具的不同,链接程序在RAM中为C程序缺省分配0x50字节堆栈空间。随着软件开发和全局变量数量的不断增加,在编译过程中链接程序最终将报告空间不足。所以,如果不注意定义堆栈尺寸,预留空间将无法满足应用需求。
实时动态内存分配及递归程序技术也非常消耗内存空间。意外事件(如按钮振动或其他造成嵌套中断的输入信号)可能会将堆栈指针推向并最终越过内存边缘。如果不做堆栈指针实时校验,堆栈可能会占用变量存储区域,一旦发生这种情况,关键的应用数据将受到破坏,程序运行结果难以预料甚至会出现软件崩溃。如果建立一种机制,即堆栈指针(SP)离开指定RAM区域时立即停止程序运行,则很容易发现问题所在。
另一种形式的复杂断点是范围断点,范围断点监控一定范围以内或以外的地址或数据总线。调试器使用两个内部结合的EEM基本触发器监控同一个总线,其中一个触发器配置为“小于”比较模式,另一个配置为“大于”比较模式,当两个条件同时满足时将停止程序执行。例如,范围断点可监控并防止CPU指令在程序内存之外读取数据。在调试过程中如果出现因计算错误的间接跳转导致程序计数器损坏的情况,范围断点会很有帮助。若与读/写修改结合使用可防止覆盖数据区域的操作。
触发器序列发生器应用
在数码相机中的应用是另一个显示EEM强大功能的实例,它应用MCU与DSP共同完成键区扫描、电源管理及实时时钟等功能。两个处理器通过串口连接,DSP向支持的MCU发送多字节指令序列请求当前电池状态。如果MCU无法正常执行指定命令,开发人员必须在串行接收中断服务中加入断点以找出问题所在,同时又不能影响应用的实时运行。目前的错误是DSP软件超时,通信中断,数据交换并未达到既定目标。解决方案:将三个复杂触发器信号输入触发器序列发生器,并完成相关设置,在接收到触发序列(长度为3个字节)的最后一个字节后马上停止程序运行。
然后用单步执行CPU在整个程序中的操作,以便分析命令未执行的原因。
状态存储单元应用
另一个功能强大的EEM组件是状态存储单元。在调试代码时如果将状态存储模块配置为CPU的每个取指周期采集状态信息,则存储器缓冲区将包含最后八个已经执行的汇编指令的历史信息(历史信息深度为8级)。手动或者通过断点停止程序运行后,上述列表可以提供程序停止前发生事件的有用信息。如果将其配置为收集基本或组合EEM触发器事件的数据,则可能只记录“跳转”、“转移”等操作指令,这为检查最近发生的程序流提供了强有力的跟踪手段。
因为通过JTAG接口访问状态存储缓冲区时,不影响CPU和应用程序,所以,可以实现马达控制应用等调试环境下的实时监视功能。例如,在向应用插入断点以停止程序运行,并通过正常监视窗口读取变量时,控制算法受到损坏,这可能引起机械设备受损。而将其中一个EEM触发器与状态存储功能结合则可实现对变量的实时监视,而不用修改程序代码。将触发器设定为监视包含写访问的变量内存地址,则可产生状态存储事件。传递到缓冲器的数据总线值即变量当前值。
本例中,反映马达当前速度的全局变量存储在地址0x200,同时受到写访问的监视。实时马达控制算法使状态存储窗口自动刷新并在“数据总线”列中显示最新的马达速度,同时不会影响应用的正常运行。从截图可以看出马达在加速。尽管使用数据总线作为实时监视器最高只能达到16位精度,但在大多数情况下可以满足应用需求。
时钟控制单元应用
EEM时钟控制单元有助于开发另外一种嵌入式应用,即将MCU用于驱动场效应管。场效应管连接到计时器PWM输出,输出信号占空比由软件算法控制。在应用运行过程中工程师需要修改RAM中的参数,应用停止之前要修改RAM内容,工程师需要禁用时钟控制配置对话窗口的“停止计时器_B仿真停止(Stop Timer_B clock onemulaion stop)”选项设置。如果手动停止程序运行,由于计时器仍然在运行并产生合适的PWM波形,所以占空比将保持20%。反之,则可能使高压输出一直加载到场效应管,造成过载并有可能损坏电路。
结语
与其它仿真手段相比,利用EEM功能进行调试要更加方便,并且成本较低,因为所有仿真功能都作为标准功能集内置在CPU内核中。EEM使复杂信号处理(需要处理敏感模拟信号)在系统内的调试成为可能。但代码覆盖、配置及深度跟踪缓冲器等部分高级调试功能仍然需要ICE。未来的功能拓展如配置、提高实时系统访问及更深度跟踪缓冲器等功能还在开发中,这些功能将进一步缩小与ICE的差距,满足嵌入式系统开发人员的需要。 |